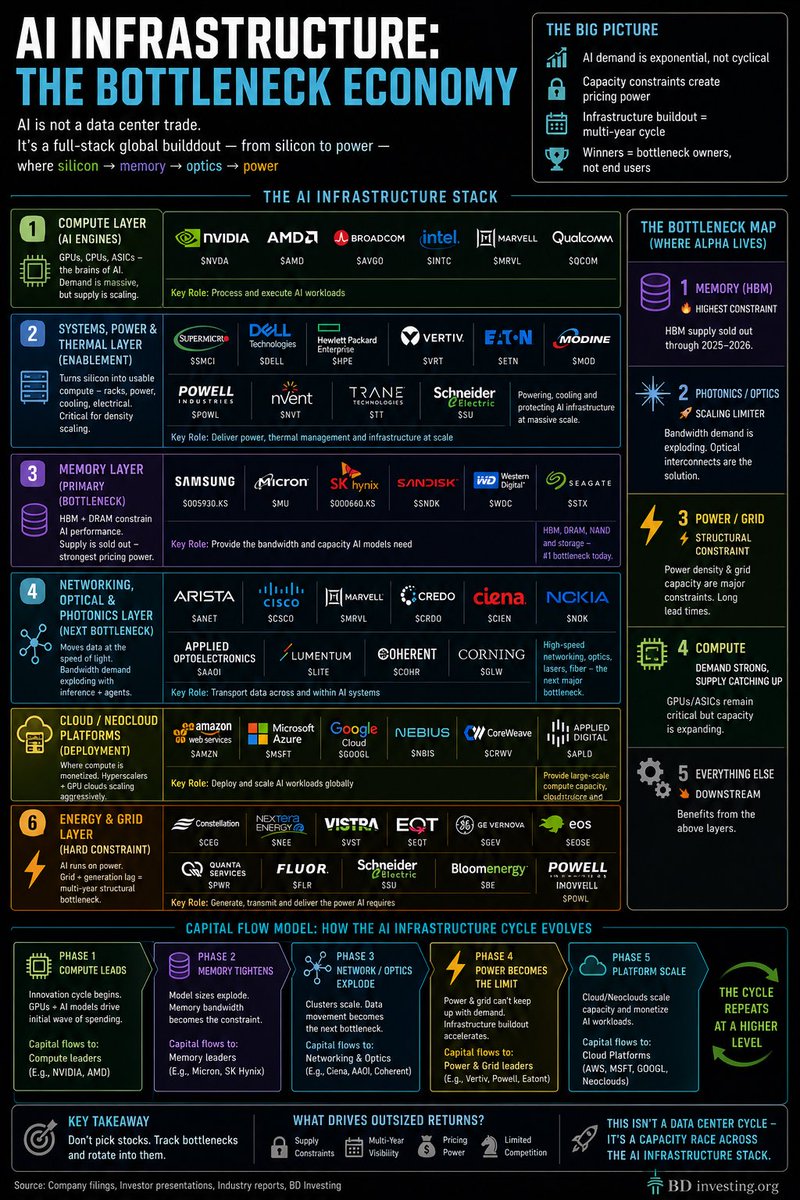
Welcome to the physical AI era. 🏭
Industrial AI is transforming manufacturing, powering smarter, more adaptive systems through digital twins and real-time simulation.
Check out our top #NVIDIAGTC 2026 industrial AI and manufacturing sessions to get started.
🔗 https://t.co/bDL3lC9B6K
DAAAM!!
"Describe Anything Anywhere at Any Moment".
State of the art approach to provide spatio-temporal memory to robots and agents. Powered by VLMs and scene graphs. Directly suitable for LLM queries. great work by Nicolas Gorlo and Lukas Schmid!
https://t.co/m3ISxmqgJO
This guy built an entire AI data science team in Python. Then open-sourced (100% free).
It automates data science workflows with AI, including data loading, cleaning, exploratory analysis, and feature engineering. And it tracks each step in a 100% reproducible pipeline.
00:00 Project Overview
01:32 Diving into the AI Data Science Workflow and Data Loading
02:10 Data Wrangling and Cleaning
03:33 Data Visualization Insights & Plotting
04:08 Feature Engineering
05:00 Live 1-Hour Workshop
05:44 AI Data Science Team Python Library
🔗 AI Data Science Team On GitHub (Give it a Star)
https://t.co/VMGf1yxIIO
🔗 Join My Next Live 1-Hour Agentic AI Workshop (Free):
https://t.co/onpLpRwkzH
A 100% open-source alternative to n8n!
Sim is a drag-and-drop UI for creating powerful AI agent workflows:
- Runs locally on your machine
- Works with local LLMs
I built a stock market research agent & connected it to Telegram in minutes.
Here's a step-by-step guide:
robot dogs aren’t toys. they’re systems.
legs → four actuators working in sync, mimicking muscle and tendon.
balance → imu + force sensors + control loops keep it upright on uneven ground.
perception → stereo cameras, lidar, depth sensors, letting it map stairs, doors, obstacles.
planning → algorithms decide where to step, how to recover from slips, how to follow you.
power → batteries small enough to carry, strong enough to run motors for hours.
what makes them special?
→ legs go where wheels can’t. rubble, forests, stairs, urban chaos.
→ small footprint but high mobility.
→ load carriers, scouts, companions.
tradeoffs:
✔ agility like animals
✔ versatility outdoors and indoors
✘ expensive actuators, high power drain
✘ complex control math (nonlinear dynamics + inverse kinematics + gait planning)
research labs push the frontier → boston dynamics spot, unitree go1, mit cheetah.
each new model is less of a prototype, more of a tool.
think about it → robotic dogs are the closest thing we’ve built to a living machine.
not just rolling robots, but walking, sensing, adapting systems.
they force us to solve locomotion, balance, perception, and planning all at once.
and that’s why robo dogs are a glimpse of the future → not just robotics, but the merging of biology, physics, and computation into machines that move like life itself.