Tenstorrent is announcing that it has closed over $693M in its Series D funding round at a pre-money valuation of $2B. Samsung Securities and AFW Partners led the round, which was oversubscribed due to strong demand from investors.
https://t.co/cyPzZ8kff9
We are pleased to announce the release of our #riscv Architectural Compatibility Suite, available in our GitHub repo. Arguably the most comprehensive #opensource RISC-V compatibility suite, read more here ->
https://t.co/tvkptY9OEw
Google Deepmind presents Grandmaster-Level Chess Without Search
paper page: https://t.co/qwpbAb9DL7
largest model reaches a Lichess blitz Elo of 2895 against humans, and successfully solves a series of challenging chess puzzles, without any domain-specific tweaks or explicit search algorithms. We also show that our model outperforms AlphaZero's policy and value networks (without MCTS) and GPT-3.5-turbo-instruct. A systematic investigation of model and dataset size shows that strong chess performance only arises at sufficient scale. To validate our results, we perform an extensive series of ablations of design choices and hyperparameters.
@petrenko_ai I was thinking about system which penalize every known way try to capture your attention. If you explicitly use something to catch user attention you should go down in ranking.
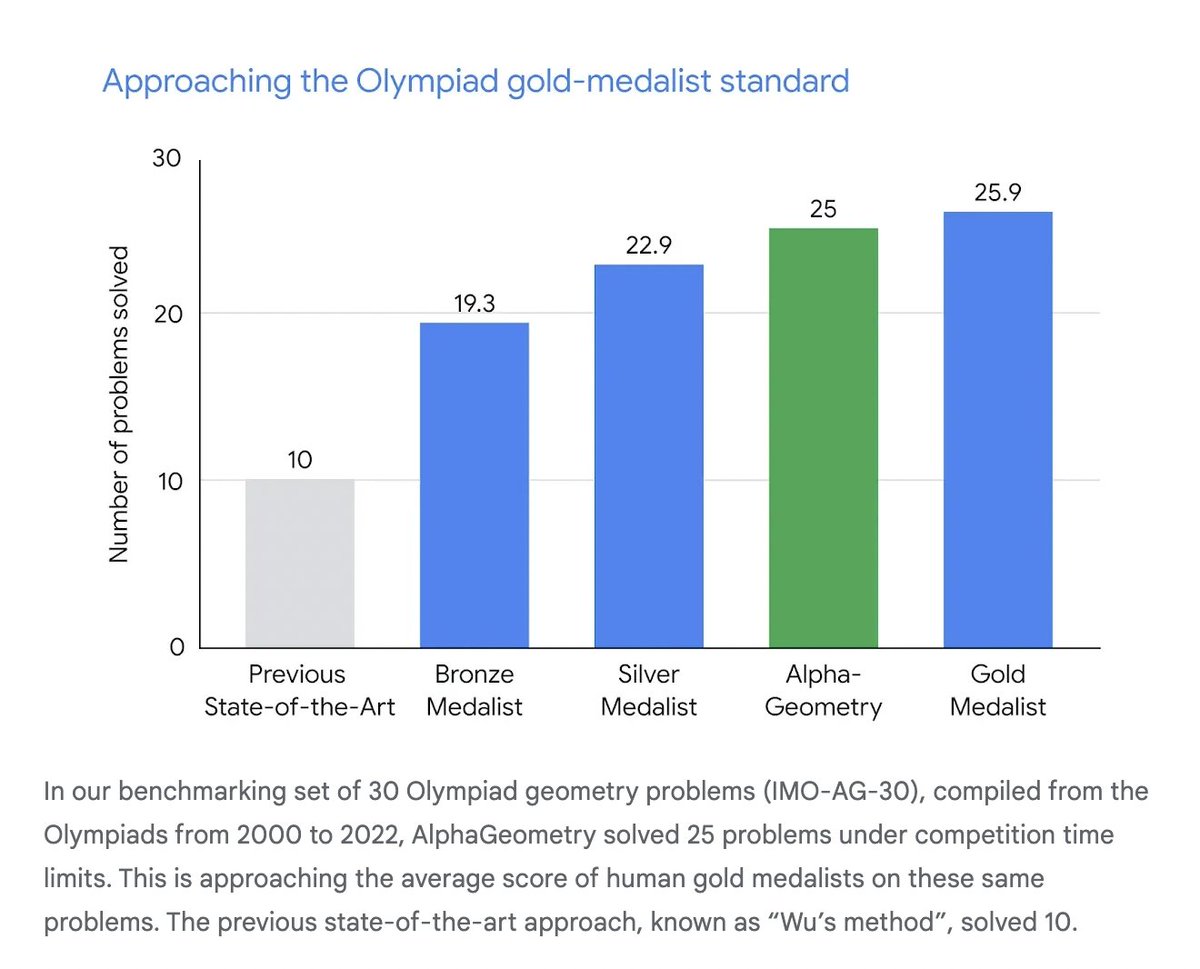
Google Deepmind announces AlphaGeometry
An Olympiad-level AI system for geometry
blog: https://t.co/45wGywH8aJ
AI system surpasses the state-of-the-art approach for geometry problems, advancing AI reasoning in mathematics
How can we reduce the deploy cost of LLMs by 100x?
From GPUs to MLSys, from MoEs to Speculative Decoding, in this blog post, we give a full-stack examination of transformer inference optimization
https://t.co/dxhsc6bKnJ
@marktenenholtz @TensorDyneCorp Thats not true. Even llama2 is pretty bad in real life usage. Whatever they do to show good scores in benchmarks it doesnt align with real life usage. Chat gpt is much better.
PHC has been accepted by ICCV 2023!
We aim to develop a physics-based humanoid controller capable of imitating ALL of the motion from the AMASS dataset (almost there🧐), recover from failure state, does NOT use any external forces, all the while supporting real-time use cases!