Every robotics team has the same problem: not enough training data, no fast way to get it.
That's what we're here to fix.
Exylos — a data engine for Physical AI. Human demos in VR → thousands of transfer-ready training episodes.
https://t.co/PGSaB9vgoG
#PhysicalAI#Robotics
Lightwheel closed ~$100M in robotics data contracts in a single quarter. The robotics data market stopped being hypothetical.
Production-scale demand is real and needs supply that scales. Centralized data production caps out at payroll cost and geographic reach.
Exylos takes a different structural bet.
A global contributor network produces structured manipulation data, verified by Curators whose $EXY rewards depend on review accuracy.
Supply scales without the payroll ceiling, and quality is enforced through aligned incentives rather than central oversight.
Same market, different structure. Demand at the data layer flows onchain to network participants, instead of staying inside corporate margins.
$EXY TGE June 11.
$EXY launches June 4 on @virtuals_io@exylos_ai is a Skill Factory for Physical AI.
Robots keep getting smarter, but they still don't have enough data teaching them how to interact with the real world.
That's the data we make, and we ship it as ready-to-train datasets for robotics teams.
The visual quality of your simulation directly affects the quality of your training data.
If the robot trains on frames that don't match what it will see through its own camera — you're teaching it a world that doesn't exist.
Left: a typical sim-generated frame.
Right: the same task rendered through our pipeline.
The data should look like reality, not like a simulator.
#Robotics #PhysicalAI
Most robotics simulators were built for physics first, visuals second. The rendered output works but it doesn't look like what a real camera sees.
We come from years of building enterprise-grade simulations where visual fidelity was the product.
We brought that into robotics data.
A policy trained on synthetic-looking frames often breaks when it encounters real-world lighting and textures for the first time.
Photorealistic rendering closes that gap before training even starts.
#Robotics @PhysicalAI
Lunar surface, zero margin for error, no way to teleop with a 1.3-second signal delay. This is the kind of task where training data has to come from simulation — and the human intent behind every decision still has to be in the data.
Exactly what our pipeline is built for.
Robots can see the world.
They still don't know how to act in it.
Every grip, every slip, every save — has to be taught. That data isn't on the internet. It has to be created.
EXYLOS — the Skill Factory for Physical AI.
Play tasks → Gate quality → Ship Skill Packs
Teach once. Train forever.
#physicalAi #robotics
Two live samples ↓
Robots are starting to act intelligent, but they still make the same mistake twice.
Better policies aren't enough. What's missing is executable memory — a way to check results, replan after errors, and turn every run into reusable knowledge.
🧵
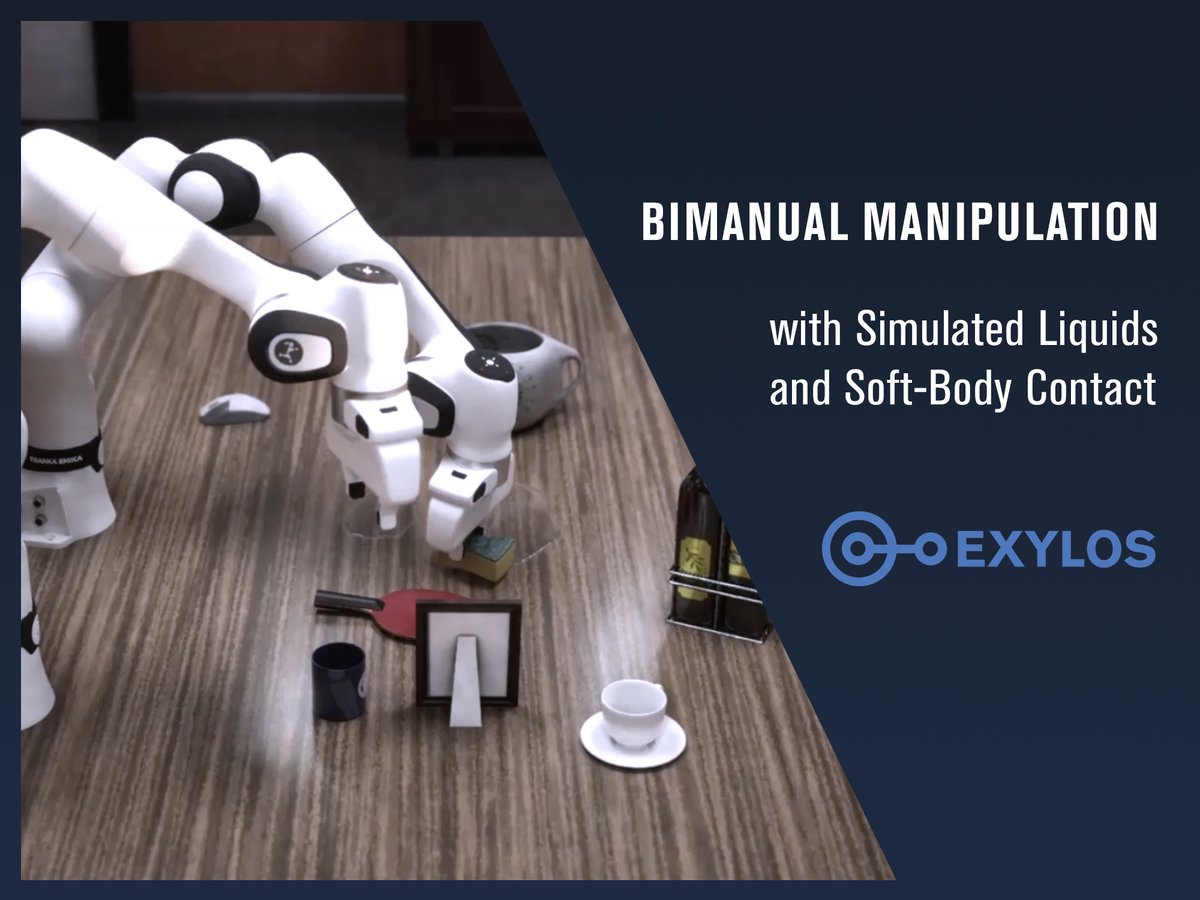
Pour some water on a table and wipe it with a sponge. You just did something most robots can't even train for.
Here's EXYLOS pipeline handling soft body and liquids — full data capture included.
#PhysicalAI#RoboticsData
Most robotics data pipelines rely on teleop farms or pure simulation. We built something between them — a human demonstrates a task once in VR, then procedural augmentation expands it into thousands of episodes with edge cases, formatted for LeRobot.
#PhysicalAI#Robotics
Exylos turns human demonstrations into robot-ready manipulation data.
Through an embodiment-aware pipeline, we convert human input into validated, densely annotated multimodal datasets for training and evaluation.
Structured learning signal for physical AI.
Everyone expects a physical ChatGPT with arms and legs. We won't get it.
The quiet irony of the humanoid boom: the exact same architecture that made LLMs miraculous is what will keep robots clumsy for the foreseeable future.
Here is why.🧵#EmbodiedAI#Robotics
Would you trust a robot to spend a few unsupervised days in your home right now? Figure's CEO thinks 2026 is the year. But every home is basically an edge case. The harder question is whether any training data today covers that variability.
#PhysicalAI#Robotics
Robotics data dilemma: egocentric video gives you real intent but raw footage only. Pure synthetic scales cheap but has zero human reasoning. The middle ground — capturing human intent inside sim — gives you both.
#PhysicalAI#Robotics#EmbodiedAI
Our data capture pipeline sneak peek: human operator in Meta Quest, Franka arm in sim, photorealistic rendering across multiple environments, egocentric camera output.
@Exylos_AI#PhysicalAI#Robotics#Innovation
Robotics sim tools are converging on great physics. But most deployment failures aren't physics failures — they're intent failures. The robot doesn't understand why a human approached the task that way.
Physics you can simulate. Intent you have to capture.
#EmbodiedAI#Robotics
In physical AI, data quality beats data volume. The winning stack is synthetic + teleop + real-world failure data, tightly filtered and looped back fast. Biggest advantage in 2026 isn’t model size - it’s who turns messy reality into clean learning fastest.
#Robotics#EmbodiedAI
Newton 1.0 is now generally available. 🙌
Take robot learning to the next level with:
🤖 Stable Articulated & Complex Mechanism Simulation – accurate, reliable machine modeling.
🖐️ High-Fidelity Hydroelastic Contact Modeling – realistic soft contact and touch-based interactions.
🧵 Deformable Body Simulation – simulate cables, cloth, rubber, and other elastic materials with VBD.
⚡ Accelerated Robot Learning at Scale – seamless integration with open simulation and learning frameworks, NVIDIA Isaac Sim and Isaac Lab for scalable workflows.
Learn how to integrate this open-source physics engine into your workflow: https://t.co/b0HmPpiEXv
#NVIDIAGTC