⚡️ macOS Deployment in Under 60s.
Deploy Insight 9 natively on macOS with a streamlined Plug & Play workflow.
Built-in Linux edge node & 10 TOPS onboard compute power real-time spatial data streaming on macOS.
#ROS2#Robotics#macOS
Insight 9 FOV & HDR Challenge! 💡
Sudden light transitions can cause exposure lag & depth data loss in Embodied AI vision, while a narrow FOV limits perception.
#EmbodiedAI#Robotics#ComputerVision#VSLAM
No LiDAR. Just Vision. 🤖
Smooth floors easily cause slippage and inaccurate leg odometry.
We adopt Insight 9 + TinyNav visual odometry for stable navigation and obstacle avoidance.
Process: Scanning ➡️ Mapping ➡️ Navigation.
#Unitree#Robotics#VSLAM
@robotics_alphax Insight 9 VIO yields 0.2% relative accuracy (drift <20cm/100m). While drift is inherent, TinyNav uses mapping & relocalization to "reset" errors via recognized landmarks, ensuring high precision for long-range missions.
No LiDAR. Just Vision.
Leg odometry can be inaccurate due to slippage, changing footholds & body motion.
We use pure visual odometry with Insight 9 + TinyNav as the primary source.
Full workflow: Scanning ➡️ Mapping ➡️ Navigation.
#Unitree#Robotics#VSLAM
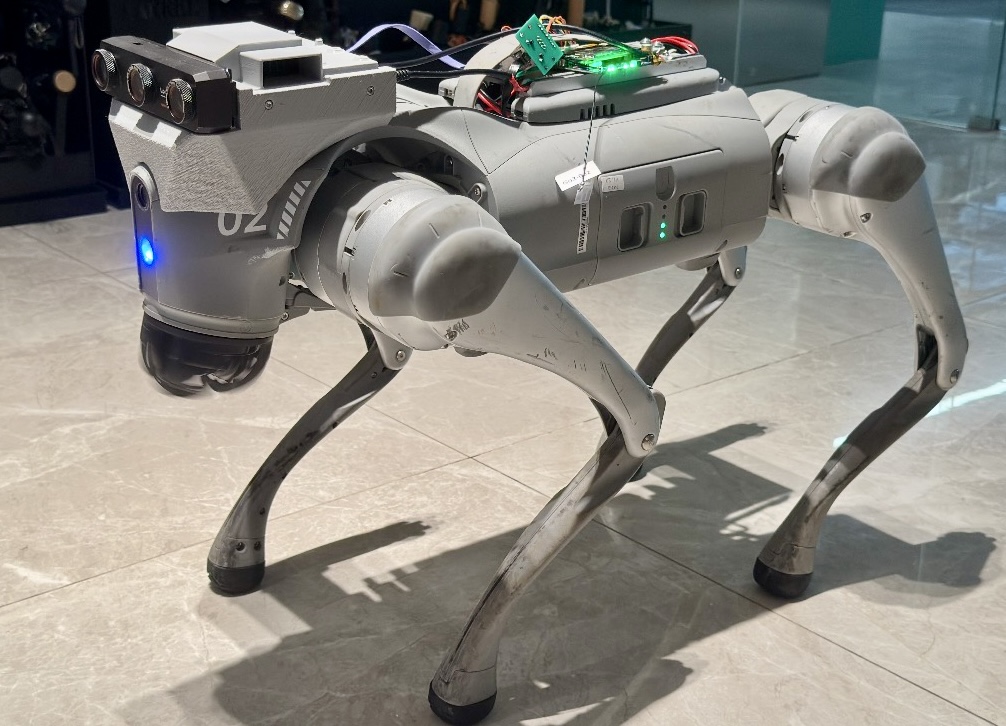
Open-Source 3D Printed Mount for Insight 9!
https://t.co/J9QBGvG81P
Compact & secure integration for Unitree Go2 Edu mounting Insight 9, Jetson Orin NX/Nano, Quectel EC200M 4G + antenna, and DC-DC converter.
#Unitree#Robotics#OpenSource
Testing vision-only navigation on Unitree GO2.
Leg odometry is unreliable on quadrupeds due to slippage and body motion, so we use pure visual odometry with Insight 9 + TinyNav as the primary source.
How far can vision-first take legged robots?
#Robotics#Unitree#ComputerVision
SLAM test on the spiral stairs!
Insight 9 handles curved paths & elevation changes, mapping a clean 3D point cloud in real-time.
💡Note: All VSLAM & depth compute runs on-board & streams via ROS! Laptop is ONLY for registration &visualization, no extra ICP or BA.
#SLAM#Robotics
SLAM test on the colored stairs!
Insight 9 beats repetitive structures & Z-drift, mapping a vibrant RGB-D point cloud in real-time.
Note: All VSLAM & depth compute runs on-board & streams via ROS! Laptop is ONLY for registration &visualization, no extra ICP or BA.
#SLAM#Robotics
VSLAM robustness test! 🚀
Watch Insight 9 handle rapid hand shaking, robotic arm swings, complex trajectories, and sudden obstacles!
It maintains continuous tracking and stable pose estimation even under high-dynamic conditions! 🦾
#SLAM#Robotics#EmbodiedAI#VSLAM
SLAM test at the Mall!
Insight 9 handles smooth floors and complex lighting, building dense 3D point cloud maps in real time.
Laptop is only for visualization. All VSLAM and point cloud processing runs fully on-board Insight 9, streamed via ROS topics!
#SLAM#Robotics#PointCloud