Researchers at IIIT Hyderabad are building drones that can adapt in real time to unpredictable conditions—handling wind, shifting loads, and dynamic environments with ease. A big step toward smarter, resilient autonomous systems.
Read more: https://t.co/lHw1UKrOO1
🚀 SegMASt3R: Geometry Grounded Segment Matching. Our work was presented at NeurIPS 2025!
@_rjayanti,Swayam Agrawal, Vansh Garg,@SidTourani1,Muhammad Haris Khan, @sourav_garg_ ,Madhava Krishna
📍 San Diego | Dec 2–7, 2025
🔗 https://t.co/FiaYlJOevY
#NeurIPS2025#Geometry #Matching
🚀 Introducing DA-VIL: Adaptive Dual-Arm Manipulation with RL & Variable Impedance Control! 🤖
DA-VIL integrates Reinforcement Learning & Optimization-based Impedance Control for real-time adaptability.
@__Shreya_B__@gauravsinghk03@f280_karim@Audio_rats@hashmis79#ICRA2025
AdaptBot: Combining LLM with Knowledge Graphs and Human Input for Generic-to-Specific Task Decomposition and Knowledge Refinement at ICRA 2025
Video link: https://t.co/p3hDwvr7Eo
Website link: https://t.co/BtRKXbWqu8
@_sssshivvvv_ ,@Karthik43128042 ,@dnabanita7 , @theramandeep04
💡 Join us for an exciting talk on AI/ML-Assisted Connected & Autonomous Vehicles for 6G and Beyond by Prof. Seshadri Mohan, Professor Emeritus, UA Little Rock!
📅 Date: 21st Feb 202
⏰ Time: 3:30 PM
📍 Venue: KRB Faculty Meeting Room
Don't miss this insightful session! #AI#6G
Last month, IIIT Hyderabad had the honor of hosting Prof. Aude Billard, President of IEEE RAS and Head of LASA Laboratory, Switzerland, along with Dr. Sudarshan Jayabalan, Chairman of IEEE RAS Hyderabad Section Student Chapter, on January 22, 2025.
Here are some memorable moments
🚁 Join the Master Trainer Program on Allied UAS Technologies!
📅 March 3-7, 2025
📍 IIIT Hyderabad, Saranga Hall 119, Nilgiri Building
🛠️ Focus Areas: Learning, Vision, Motion Planning for UAS
🔗 Register here: https://t.co/CvbdxUipO4
👋Join the Master Trainer Program on Allied UAS Technologies!
📅 March 3-7, 2025, IIIT Hyderabad, Saranga Hall 119, Nilgiri Building
🛠️ Focus Areas: Learning, Vision, Motion Planning for UAS
🔗 Register here: https://t.co/CvbdxUipO4
Secure your spot now! 🚀
#UAS#Drones#AI#RRC
🚀 Join us for an inspiring talk by Dr. Shreya Santra on Advanced Robotics for Space Exploration! 🌌🤖
📅 Date: 16th Jan 2025
⏰ Time: 3:30 pm
📍 Venue: KRB Auditorium, IIITH
Explore how cutting-edge robotics is shaping the future of space missions.✨ #SpaceExploration#Robotics
Join us for the Second Workshop on Systems and Intelligence for UAV 🚀 an event exploring cutting-edge advancements in UAV technologies!
🗓 Date: 18th & 19th Dec 2024
⏰ Time: 10:00 AM – 5:00 PM
📍 Venue: IIITH Campus
👉 Register Now: https://t.co/RvToGsq5Sn
#UAVWorkshop#IIITH
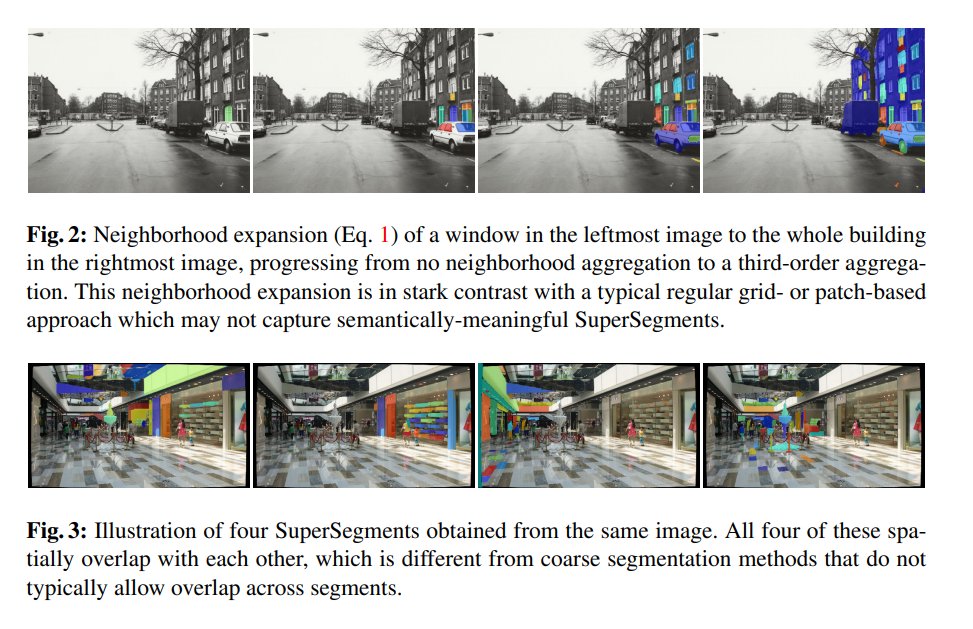
Places are composed of things. Recognizing & retrieving these things instead of the whole image enables
🧭viewpoint invariance
🖼️semantic interpretability
🔮open-set recognition
🧵on our #ECCV2024 paper:
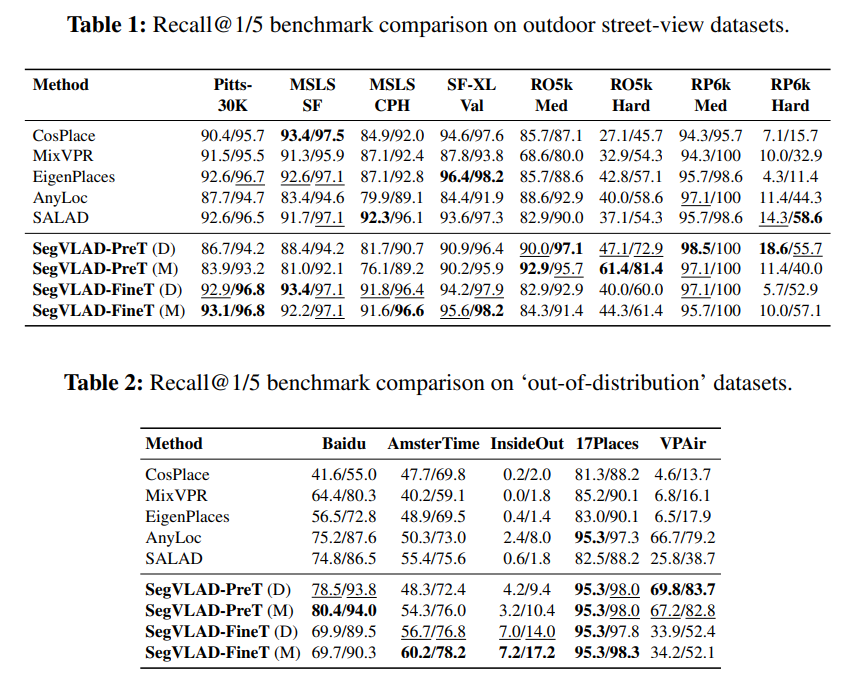
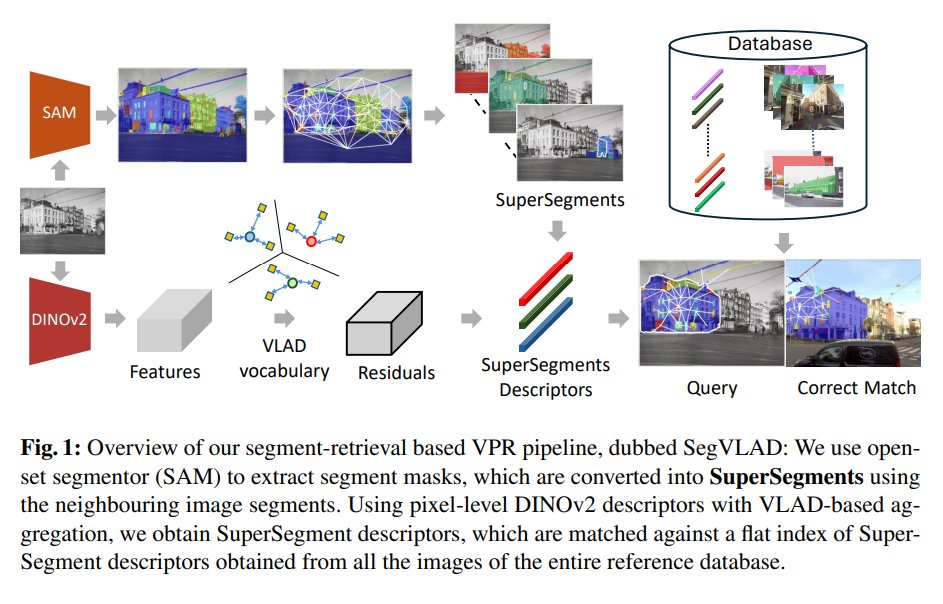
Revisit Anything: Visual Place Recognition via Image Segment Retrieval
👇
Revisit Anything: Visual Place Recognition via Image Segment Retrieval
Kartik Garg, Sai Shubodh Puligilla, Shishir Kolathaya, Madhava Krishna, @sourav_garg_
tl;dr: encoding and searching for image segments instead of the whole images
https://t.co/JdAhTDqCpK
RRC paper "Open-Set 3D Semantic Instance Maps for Vision Language Navigation (O3D-SIM)" has been accepted in Advanced Robotics! journal
Work led by Laksh Nanwani, Kumaraditya Gupta, Aditya Mathur, & Swayam Agrawal, under guidance of Prof. Madhava Krishna & Dr. A. H. Abdul Hafez.
📢Excited to share that our paper CGDF has been accepted to #IROS2024🎉
📖 Title: Constrained 6-DoF Grasp Generation on Complex Shapes for Improved Dual-Arm Manipulation
✨ CGDF is a grasp diffusion model that generates targeted grasps on object parts efficiently. 🚀
🧵1/n
🎉 Excited to share that our paper "DiffPrompter: Differentiable Implicit Visual Prompts for Semantic-Segmentation in Adverse Conditions" is accepted to #IROS2024 🤖
📄 Paper link: https://t.co/9Qiu2y3NxQ
🔗 Website: https://t.co/Xgxtq3p9dj
💻 Code: https://t.co/3ZOSPyEMSW
🧵👇
🚀 Check out our paper "QueSTMaps: Queryable Semantic Topological Maps for 3D Scene Understanding" by @yash_mehan , Kumaraditya Gupta, @_rjayanti , @user_1123581321 , @sourav_garg_ , and Madhava Krishna at #IROS2024
video link: https://t.co/Lfq4FBtP0k
https://t.co/5Xwj13p6Lv
🚀 Excited to share that our team has submitted 6 groundbreaking papers to #IROS2024! our work on dual-arm manipulation, autonomous driving, trajectory optimization, intelligent visual servoing, semantic-segmentation, and 3D scene understanding. #Robotics#AI