@Figure_robot Nice Demo! Multi-robot cooperation is an important task in household activities, and we did some research on this topic in 2023. Everything open-sourced, find out more at https://t.co/v2U356g4g8
@jbhuang0604 From the perspective of an PhD applicant, it is hard to apply for a phd position these years given that many faculties are actually on-leave.
Generative models (diffusion/flow) are taking over robotics 🤖. But do we really need to model the full action distribution to control a robot?
We suspected the success of Generative Control Policies (GCPs) might be "Much Ado About Noising."
We rigorously tested the myths. 🧵👇
Just reconstructed a 3D model of Porcelain Tower of Nanjing(南京大報恩寺琉璃塔) using SAM 3D. The tower was burned down in 1856, which means it would in no way exist in the training data.
The result is CRAZY.
Imagine a future where you can ask humanoid robots to clean your room, but some items, like heavy sofas, are too challenging for just one robot to move.
Introducing CooHOI, a learning-based framework designed for the cooperative transportation of objects by multiple humanoid robots. 🤖🤼🤖
Our work has been accepted as Spotlight at NeurIPS 2024. Website: https://t.co/gWFSYEqAAD
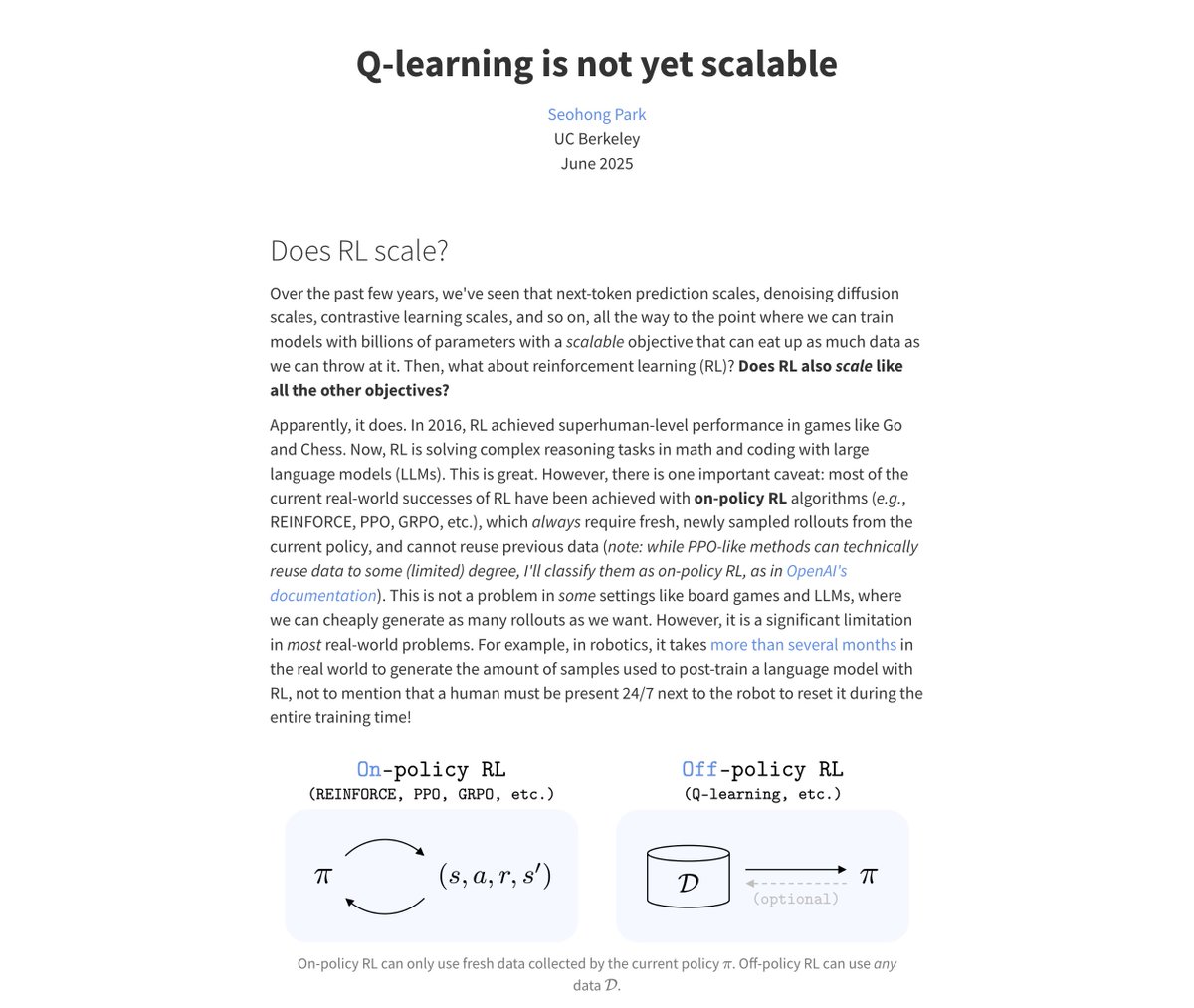
Q-learning is not yet scalable
https://t.co/hoYUdAAeGZ
I wrote a blog post about my thoughts on scalable RL algorithms.
To be clear, I'm still highly optimistic about off-policy RL and Q-learning! I just think we haven't found the right solution yet (the post discusses why).