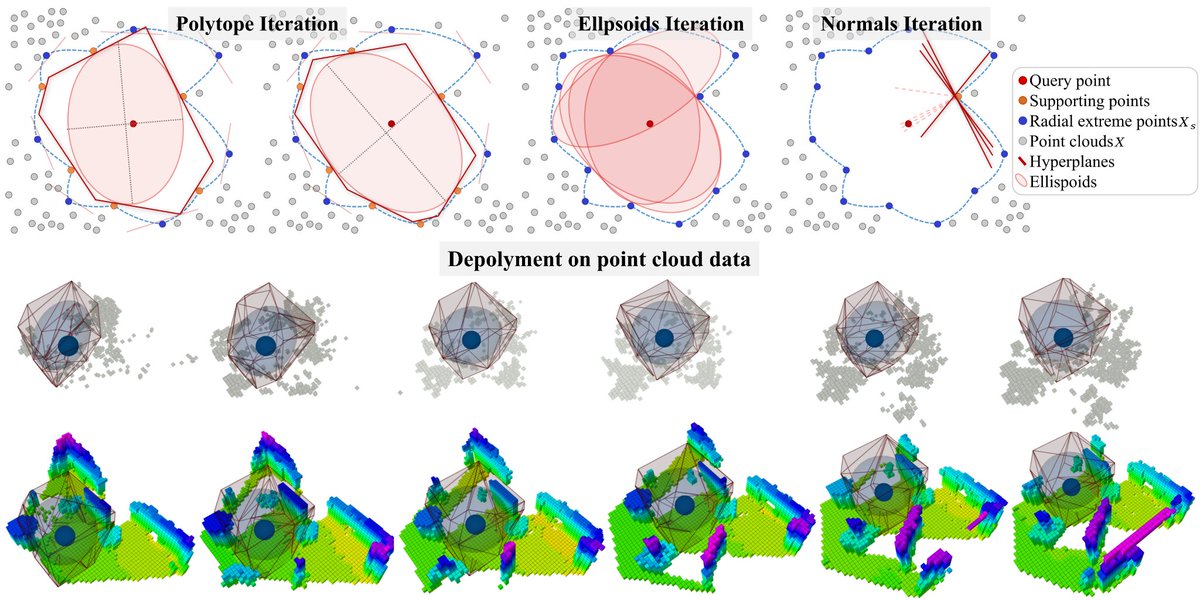
On Monday, GRASP Lab members will be presenting their STAR-Filter paper at WAFR 2026. Read the GRASP Blog Post by co-author Yuwei Wu for more information on the publication!
https://t.co/1TQykPTxZt
#GRASP#GRASPLab#WAFR2026
🚨 Deadline Approaching!
Call for Contributions to our workshop, Leveraging Implicit Methods for Aerial Autonomy at RSS 2025.
For more details, please check 🔗 https://t.co/SqvnHTYvaH
#Robotics#drones#RSS2025#RSS
We hope everyone had a wonderful time at the Fun with Robots week 2 event at the Roxborough Library!
A BIG Thank you to Yuwei Wu for presenting this week!
Hope to see you all at week 3!
#GRASP#GRASPLab#FunwithRobots#RoxboroughLibrary
Fun with Robots week 2 starts TOMORROW from 4PM-5PM at the Roxborough Library! GRASP's own Yuwei Wu will be presenting Flying Robot Swarms!
We hope you all have a wonderful time!
#GRASP#GRASPLab#FunwithRobots#RoxboroughLibrary
Fun with Robots is BACK TOMORROW from 4PM-5PM! GRASP's own Katherine Mao will be heading the first day of Fun with Robots!
We hope to see you all there!
#FunwithRobots#GRASP#GRASPLab#RoxboroughLibrary
Excited to share our recently accepted RA-L paper, "Towards Optimizing a Convex Cover of Collision-Free Space for Trajectory Generation." We propose an online iterative algorithm to optimize a convex cover to under-approximate the free space for autonomy. https://t.co/sJM66yYB9n
Excited to share our #ICRA2025 paper titled "Safe Interval Motion Planning for Quadrotors in Dynamic Environments."
We introduce an efficient spatial-temporal planning framework for dynamic obstacle avoidance.
Preprint: https://t.co/XzQfOjZCdm
Video: https://t.co/emI5FMNML2
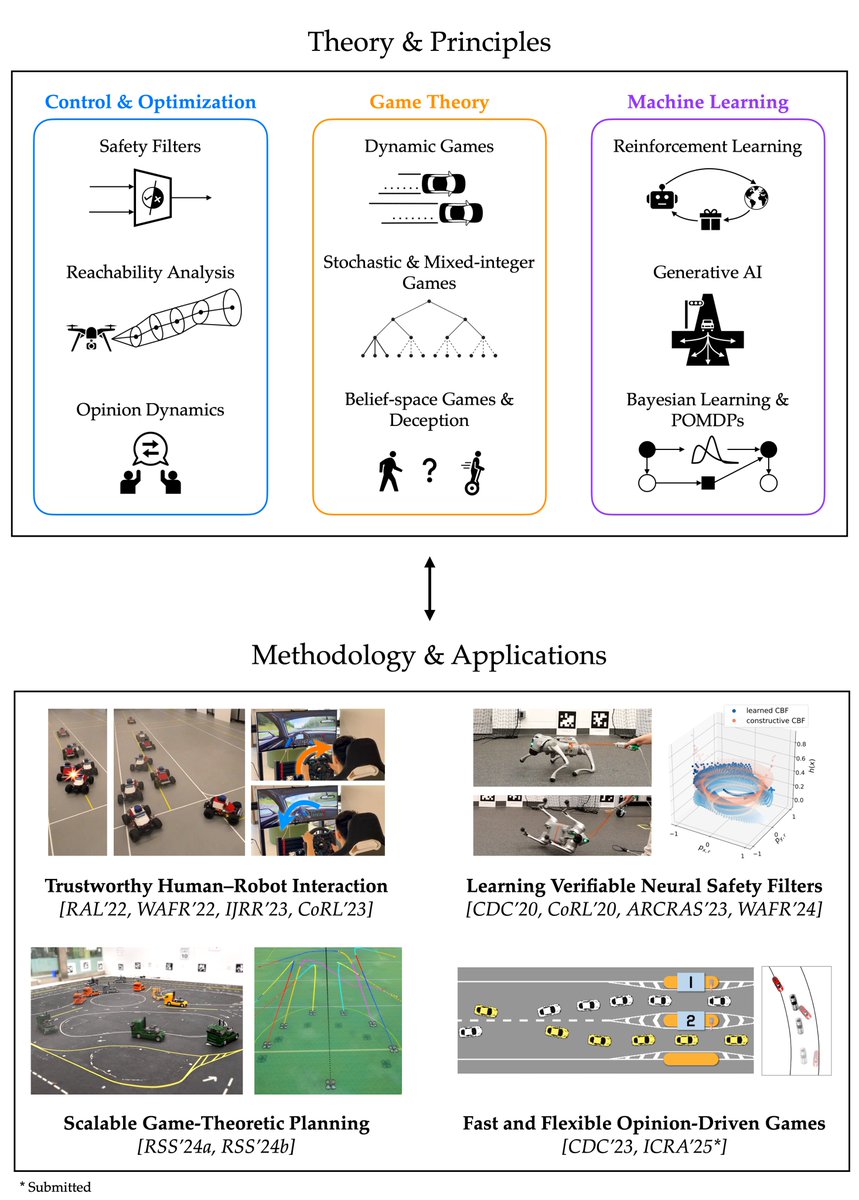
🚨 I'm on the job market looking for tenure-track positions in robotics and autonomy🤖! I'm a PhD Candidate at @Princeton
My research focuses on interactive motion planning in the joint space of physical🌍 and information📊 states (e.g., beliefs), actively ensuring safety and improving efficiency as robots autonomously navigate uncertain environments and interact with people.
My work draws on:
♟️ Game Theory
🧠 Machine Learning/AI
🔄 Control and Optimization
Reposting is much appreciated!
More info on my website:
https://t.co/a3q4JW6eQY
My research thrusts👇
So happy to see this work published. @pxlweavr's SPOMP is in early access at T-FR! We also uploaded all the code in Github! @vijay_r_kumar@GRASPlab@PennEngineers
https://t.co/XX7rIqN6G3
https://t.co/aay2flyl3K
I'm excited to share our recent projects:
1. A novel global yaw parameterization for trajectory optimization, accepted by IROS 2024. preprint: https://t.co/jY7OUosd4z
2. A risk-aware multi-robot tracking with danger zones, accepted by DARS 2024. preprint: https://t.co/iauxjqF25Y
The first modularized planning benchmark for quadrotors within parameterized environments is open-sourced.
Check out our code and papers!
https://t.co/uRd5oOA3ZA
Check out our recent work AllocNet, a lightweight learning-based trajectory optimization framework for quadrotors, which has been accepted by IEEE Robotics and Automation Letters (RA-L).
Preprint: https://t.co/y1oZXFZj4Z
Code/Models are also available: https://t.co/BkmV0EM9fG
My recent work, "An Efficient Spatial-Temporal Trajectory Planner for Autonomous Vehicles in Unstructured Environments," at #ZJU, has been accepted by IEEE Transactions on Intelligent Transportation Systems. Preprint: https://t.co/3gjzvzn8Ci
Video: https://t.co/Zpp1QKitAa
Have a great paper on learning, dynamics, and control that didn't get a fair shake at a certain ML conference? Well good news everyone! Submissions to L4DC 2023 are open at https://t.co/dsxIVZdNga! Submission deadline of Nov 18th, 2023. Fair and balanced reviews guaranteed!