We are super excited to share with you our initial release of Lucky Engine. We are building a robotics engine from the ground up to be what we wished we could find in a simulator before
We’re dropping Gemini Omni: our first step towards a model that can create anything from anything - starting with video.
It combines Gemini’s intelligence with our generative media systems - representing a leap forward in world understanding, multimodality, and editing 🧵
Real-world models are here! Stoked to share how we're bringing real-world locations to life by integrating Street View into Genie. Try it now at https://t.co/j6c1N38tRS and read the blog for more info:
https://t.co/6ZOi9d9rah
Finally this thing seems close.
Monocular depth estimation is not seriously useful in robotics. Classical stereo can have a lot of noise and artifacts (realsense). New-gen stereos (zed, oak) are much better but still degenerate when matching is hard.
This framing by OP is actually an argument for automating science and terrible argument against it
If you delay automating science and curing cancer because you want to provide folks with the ego trip of getting credit assignment or doing performative work, you are clearly willing to cause harm by omission
Any year we were to delay a cure by holding back, countless people would die and experience a massively reduced quality of life
Indeed given this framing, the imperative is to automate as much science and research as quickly as possible to cure cancer and diseases regardless of other considerations, especially the egos of any scientists and researchers
I also think this framing is unnecessary because humans will remain in the loop for the foreseeable future in many ways and any breakthroughs are shared by the humans involved in them anyway
Cancer sucks. Read this moving tribute. This is also a good reminder that many researchers you talk to are silently battling epic struggles unrelated to their work. Here’s to hoping research’s leaderboard culture makes room for empathy and kindness.
I’m beyond excited to announce our MIT Press book on Neuroevolution! An HTML version is now available for free on https://t.co/Q9uDN3w1GM, with a print edition coming out later in 2026.
Real intelligence is not static; it evolves. For decades, the field of neuroevolution has pursued this necessary adaptability. Our book chronicles its development, from early concepts to its modern integration with deep learning and reinforcement learning, exploring its potential for understanding the origins of intelligence and its real-world applications.
And the companion webpage is more than just a book site! It comes equipped with interactive demos, videos, exercises, and tutorials to allow everyone to experience neuroevolution in action. Check it out and let us know what you think!
It was a pleasure to work on this book over the last 4+ years with David (@hardmaru), Yujin (@yujin_tang), and Risto. We are incredibly proud of the result and look forward to celebrating! We hope to connect with many of you at NeurIPS.
We are very grateful to Melanie Mitchell (@MelMitchell1) who provided a fantastic foreword. To quote her: “The next big thing in AI is coming, and I suspect that neuroevolution will be a major part of it”. We think so too!
The Verge just called Matic “smarter, quieter, and [able to] get the job done.”
Under the hood, Matic is running a live 3D voxel occupancy map from regular cameras.
This is what “robot vac that cleans like a human” looks like.
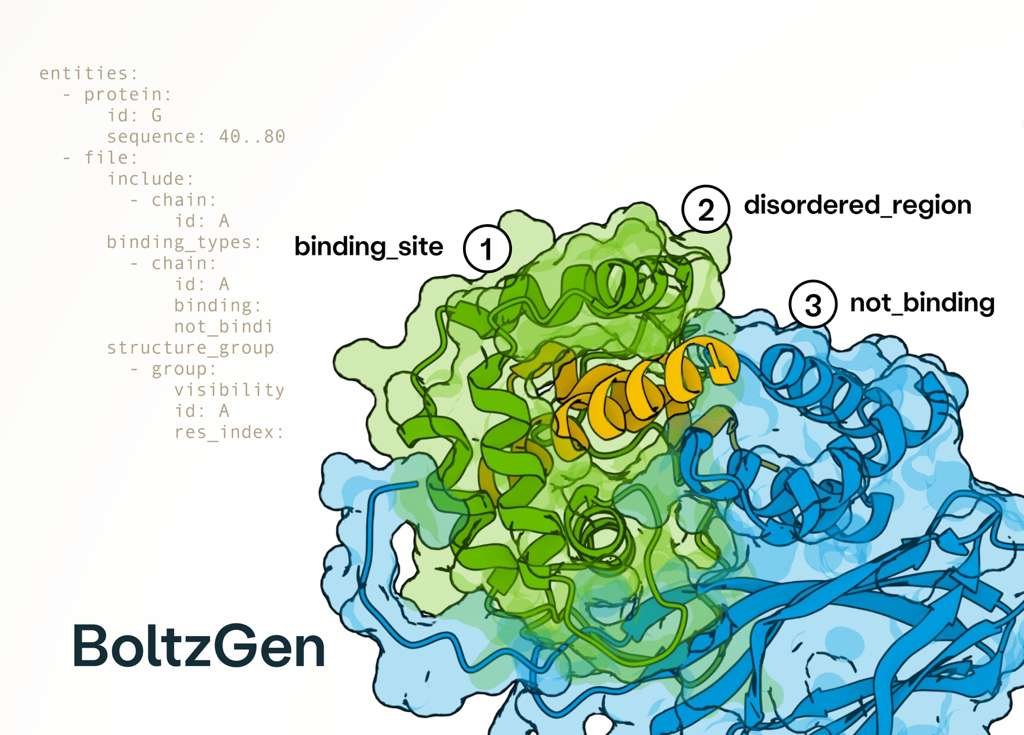
Excited to release BoltzGen which brings SOTA folding performance to binder design! The best part of this project has been collaborating with many leading biologists who tested BoltzGen at an unprecedented scale, showing success on many novel targets and pushing its limits! 🧵..
“Happy Funland” created using @CSM_ai
Fun fact: it took longer to create this 50 second video than it did to create this world! 😳 (Not joking)
CSM_ai requires no coding or modeling skills, making it perfect for the Hackathon in @decentraland Come visit at Canessa.dcl.eth 🤡
Simulation drives robotics progress, but how do we close the reality gap?
Introducing GaussGym: an open-source framework for learning locomotion from pixels with ultra-fast parallelized photorealistic rendering across >4,000 iPhone, GrandTour, ARKit, and Veo scenes!
Thread 🧵
🎮 How can agents learn to generalize from limited offline data?
We introduce iMac (Imagined Autocurricula) - training agents entirely in world models with emergent curricula!
I'm super excited to announce mjlab today!
mjlab = Isaac Lab's APIs + best-in-class MuJoCo physics + massively parallel GPU acceleration
Built directly on MuJoCo Warp with the abstractions you love.
At Generalist, we’re working towards a future where robots can do anything. To that end, the robots build now, too. We’ve trained a robot to do one-shot assembly, constructing Legos end-to-end: no custom engineering, just pixels in → Lego copies out.
Graphics folks - should we raise funds and build a new generation of on-device rendering systems, where the render state is continuously updated through a remote world model? 🤔
To hide all the latencies and have 60-120 FPS on a PC/Mobile/VR/MR?
Text, logos, and fine details have always been tough for 3D AI - but we’ve cracked it 🚀
Our latest model delivers unprecedented textured mesh quality, and it scales nicely with compute & data.
Coming soon 👀