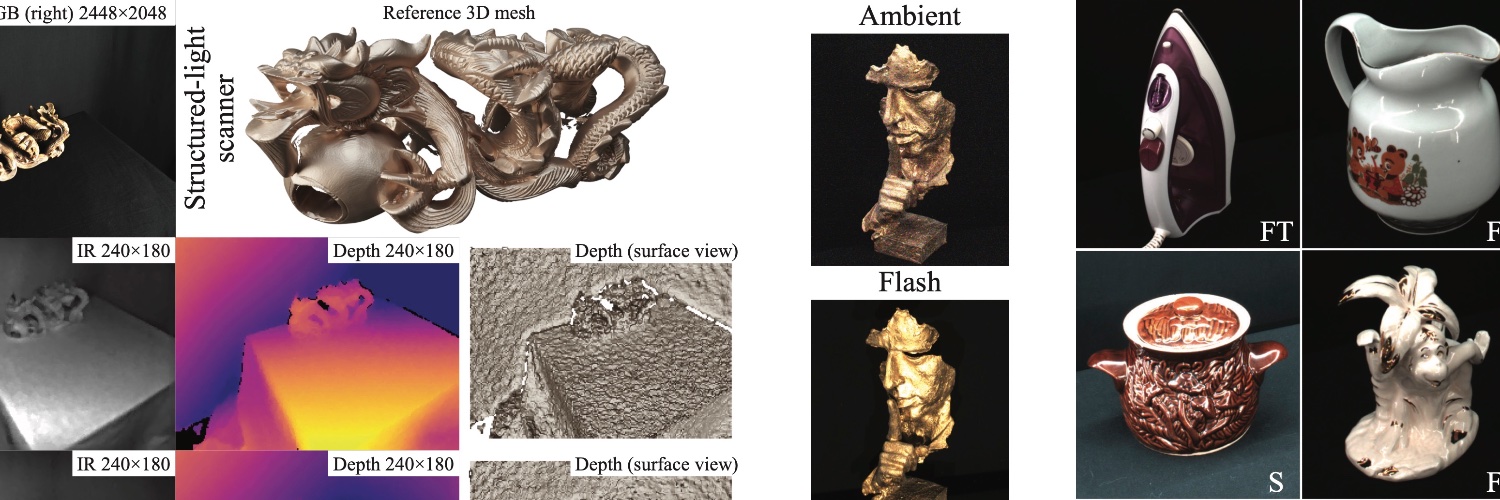
Excited to share the release of Sk3D: a new multi-sensor dataset for multi-view 3D surface reconstruction.
Sk3D provides registered RGB **and depth** for 7 sensors of varying resolutions and modalities.
#CVPR2023
Project: https://t.co/GRsPnWqjX9
Video: https://t.co/4CxRzlAJm7
Happy to share our latest research on human face 👧🏾👨🏻🦳👳🏾♂️👶🏼 and, importantly, head 💂🏻♀️🧕🏾🧑🚀🧟tracking!
DenseMarks delivers dense features for use in multiple tasks - check it out!
❌ Tracking by 68 sparse face landmarks?
✅ Tracking by dense, per-pixel head landmarks
📣 DenseMarks: Learning Canonical Embeddings for Human Heads Images via Point Tracks
https://t.co/GBKBUYHaSb
🧵
Excited to share the opportunities for two internships at the Apple European Vision Group. Join us in expanding the boundaries of human-centric vision and generative AI technologies for millions of Apple users
https://t.co/PiLsD0FzlX
Happy to announce that two our papers
"DeepMIF: Deep Monotonic Implicit Fields for Large-Scale LiDAR 3D Mapping" and "AutoInst: Automatic Instance-Based Segmentation of LiDAR 3D Scans"
have been accepted to IROS 2024 Abu Dhabi! Congratulations to the team!
We're looking to fill the secretary position in our lab in Garching at @TU_Muenchen!
Wir suchen für unser Team ab sofort in Voll- oder Teilzeit eine Besetzung der Stelle Lehrstuhlsekretärin / Lehrstuhlsekretär (m/w/d) !!!
Details / Applications Process:
https://t.co/dAuZG9diHo
We achieve higher completion rate and perceptually appealing results by fitting a non-metric monotonic implicit field to LiDAR 3D point clouds, enforcing monotonous constraints over samples along LiDAR rays.
Joint work with Kutay Yilmaz, Anastasiia Kornilova, Matthias Nießner.
DeepMIF: Deep Monotonic Implicit Fields for Large-Scale LiDAR 3D Mapping
A method for large-scale 3D scene reconstruction from sparse 3D LiDAR scans.
Project: https://t.co/Mh1zj0P9KF
Vid: https://t.co/OGITkxikxi
Text: https://t.co/N6EzCrBvFA
We leverage multi-modal self-supervised features and perform graph-cuts to generate instance proposals. These initial proposals are further refined with a self-training algorithm.
Joint w/ @CedricPerauer, Laurenz Heidrich, Haifan Zhang, @MattNiessner , and Anastasiia Kornilova
AutoInst: Automatic Instance-Based Segmentation of LiDAR 3D Scans
A method for unsupervised instance segmentation of 3D outdoor LiDAR scenes.
Project: https://t.co/m8DJanWH2T
Vid: https://t.co/Z9OyZbskdJ
Paper : https://t.co/rrmvQdjmWV
Hit two milestones today:
* 1K overall cites of my work https://t.co/BGvohtJt6b
* 400 cites for ABC dataset https://t.co/zQaI0RMi7S
Very thankful to colleagues and encouraged to keep up the work.
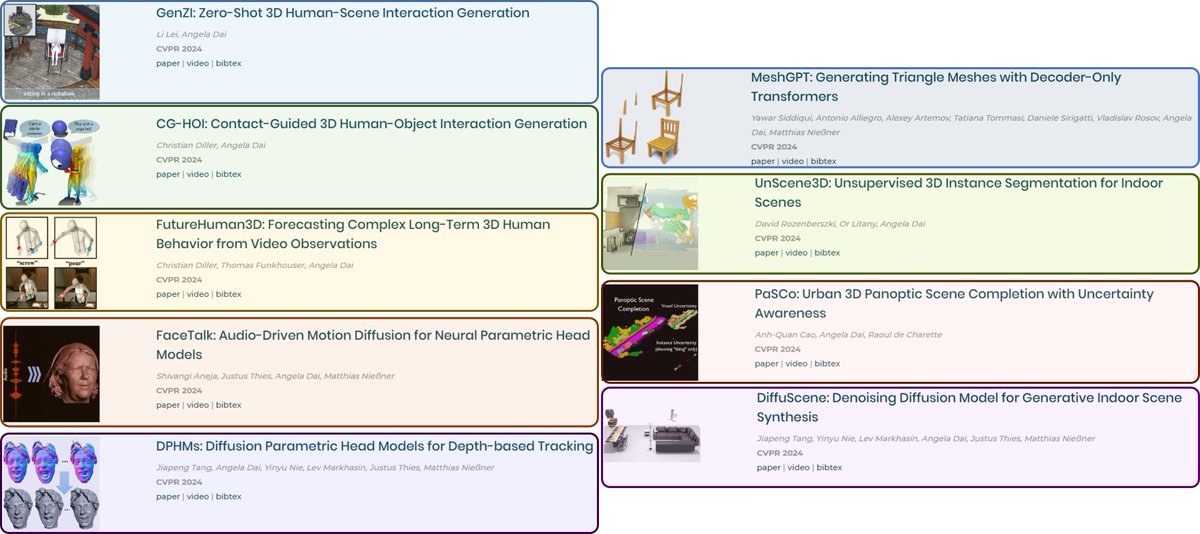
Our group has fourteen papers accepted at #CVPR'2024!
Exciting topics: lots of diffusion & transformers focusing on generative AI for image synthesis, geometry generation, and many more - check it out!
I'm so proud of everyone involved - let's go 🚀🚀
https://t.co/rEHOJusF4g
Our priors encode feature-aware fields on surface meshes, enabling to localize and recover sharp geometric feature curves for automatic mesh optimization.
Joint work with Natalia Soboleva, Olga Gorbunova, @IvanovaMPe@burnaevevgeny@MattNiessner and Denis Zorin
(1/2)
Check out 𝐌𝐞𝐬𝐡𝐆𝐏𝐓!
MeshGPT generates triangle meshes by autoregressively sampling from a transformer model that produces tokens from a learned geometric vocabulary.
As a result, we obtain clean and compact meshes :)
https://t.co/ynrf0qjYVF
https://t.co/rQe7ipP15t