Join us for our ICRA 2025 Workshop "Beyond Pick and Place — Unifying Learning-Based and Model-Based Approaches for Contact-Rich Manipulation" on Friday May 23rd!
https://t.co/w0mBP9F4bG
Ever wondered which data from large datasets (like OXE) actually helps when training/tuning a policy for specific tasks?
We present DataMIL, a framework for measuring how each training sample influences policy performance, hence enabling effective data selection 🧵
🤔What tasks do we want robots to handle? Are these preferences based on saved time or feelings we associate with the tasks?
Introducing Why Automate This?—a study exploring automation preferences across social groups, using feelings & time-spent as key factors. 👇 (1/5)
Intelligent agents such as humans explore their surroundings to gather information and complete tasks.
In our #CoRL2024 work -- Learning to Look 👀, we teach robots to find relevant information in their environment. 🤖✨
🌐: https://t.co/1DxUJCXDHR
🧵👇
Are you worried your robot arm will break during manipulation or learning tasks in human unstructured environments?
Meet BaRiFlex: a versatile, collision-robust, and affordable robotic gripper designed for resilient robot learning! 🤖✨👇 (1/6)
🌐 https://t.co/G1X7AnhuOC
🤖 Want your robot to grab you a drink from the kitchen downstairs?
🚀 Introducing BUMBLE: a framework to solve building-wide mobile manipulation tasks by harnessing the power of Vision-Language Models (VLMs). 👇 (1/5)
🌐 https://t.co/61eev1Jyvw
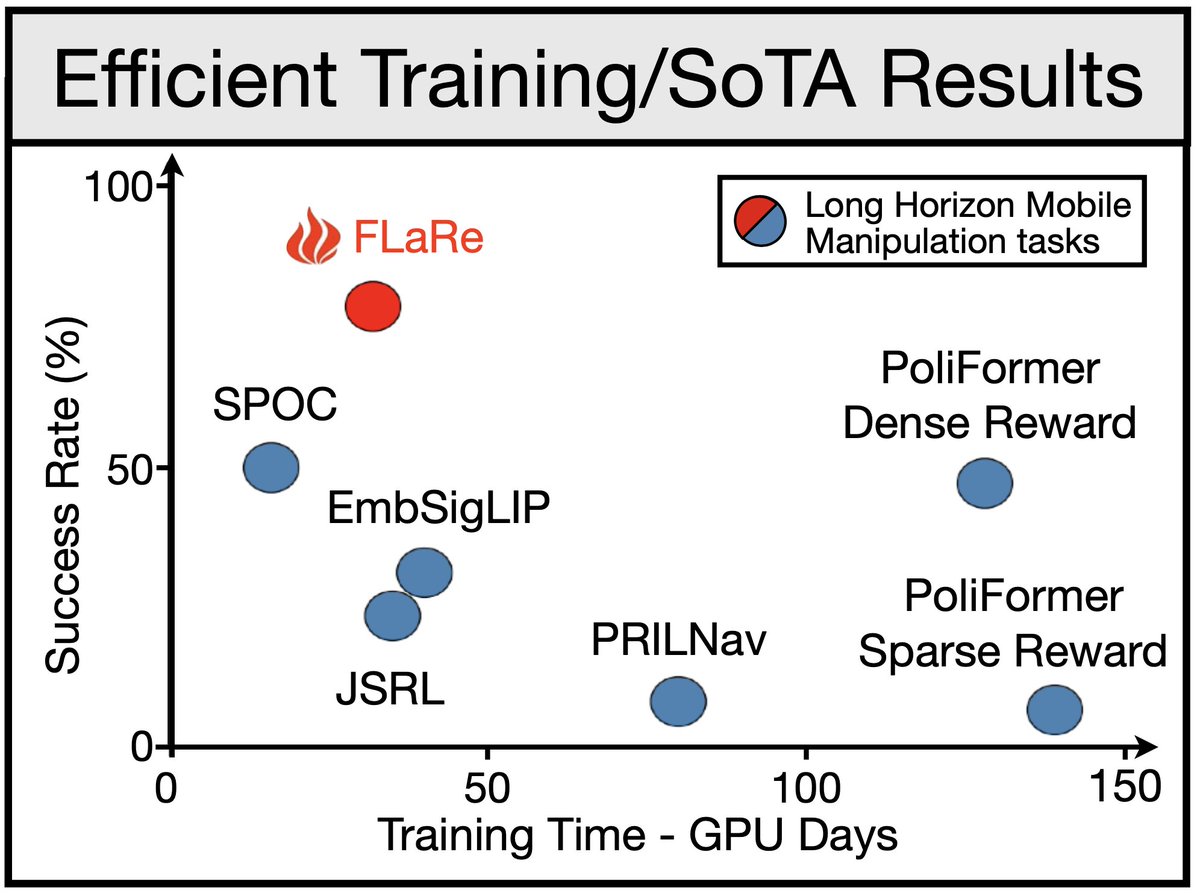
🚀 Despite efforts to scale up Behavior Cloning for Robots, large-scale BC has yet to live up to its promise. How can we break through the performance plateau? Introducing 🔥FLaRe: fine-tuning large-scale robot policies with Reinforcement Learning.
https://t.co/iRC1NTgoFI 🧵
10 years after DQN, what are deep RL’s impacts on robotics? Which robotic problems have seen the most thrilling real-world successes thanks to DRL? Where do we still need to push the boundaries, and how?
Our latest survey explores these questions! Read on for more details. 👇
How do robots understand natural language?
#IJCAI2024 survey paper on robotic language grounding
We situated papers into a spectrum w/ two poles, grounding language to symbols and high-dimensional embeddings. We discussed tradeoffs, open problems & exciting future directions!
RL in POMDPs is hard because you need memory. Remembering *everything* is expensive, and RNNs can only get you so far applied naively.
New paper: 🎉 we introduce a theory-backed loss function that greatly improves RNN performance! 🧵 1/n
Need a way to collect data on your mobile manipulator?
We present TeleMoMa, a teleoperation system that,
1. Enables multiple input modalities, making use of readily available and accessible hardware
2. Can be plugged in with any mobile manipulator to start data collection
🧵👇
Congratulations to Ben Abbatematteo, who successfully defended his PhD thesis ("Exploiting Structure for Efficient Robotic Manipulation") yesterday. Congrats Ben - the lab won't be the same without you! @StefanieTellex@BrownCSDept
Initiation sets allow hierarchical RL agents to learn and plan without increasing the branching factor of decision making. But, current approaches to learning init sets do not acknowledge three major challenges: non-stationarity, pessimism and termporal generalization. Come by my #NeurIPS2023 poster to learn about issues that plague HRL agents and to find out about how we can mitigate them. Tues 5:15 pm # 1300.