Re-designed the gear drive to be 16:1 gear reduction,
needed the extra kick for small sized robotic leg actuator.
Improvements:-
1. Torque peak 5Nm(before 2Nm)
2. Torque nominal 3Nm
3. Weight ~305gm
4. Smooth small scale motion.
Just finished building complete MIT style QDD actuator module with 4:1 gear drive train.
Improvement from last design:
- can communicate over CAN bus.
- easily programmable with arduino
- expected good torque rating (yet to benchmark fully).
- handling high current upto 40 amps
Just finished prototyping cheapest possible foc based position control motor/actuator.
- 1: 4 planetry gear based output.
Able to do velocity, torque and position control.
Can not find a good affordable 3 phase motor driver in india... 🥲
@Abdu_lah14 can work with terminal easily, hardware is good, structurally feel good, internal libs work great with any package.
but yeah too much price addition for all this.
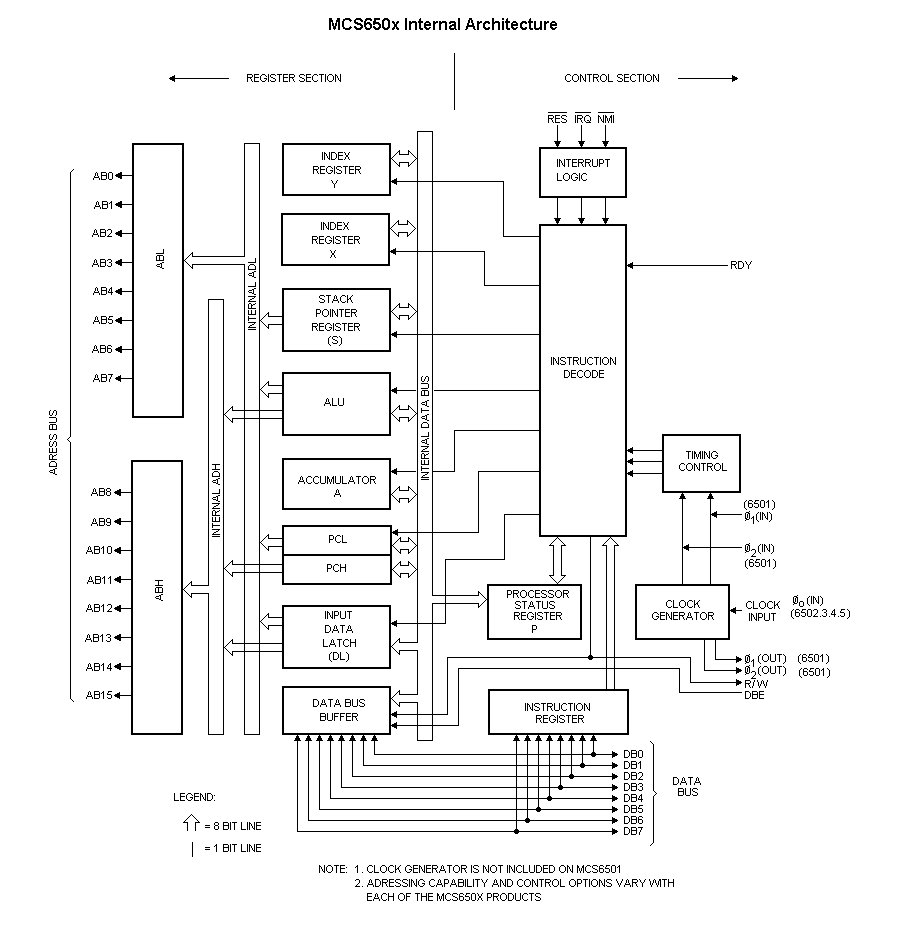
If anyone is interested in how CPU works, I have created this project that work as 6502 cpu emulator, you can load assembly programs directly onto cpu, also included some references.
looking forward to create BIOS for it.
https://t.co/mTb8hKupWK