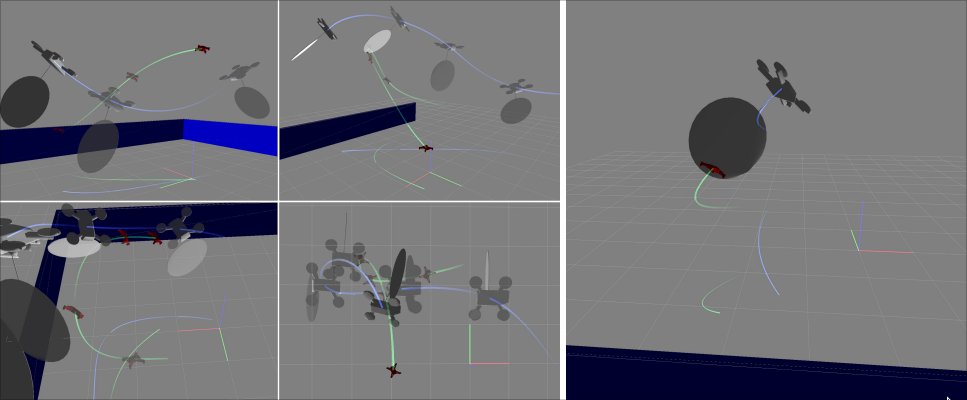
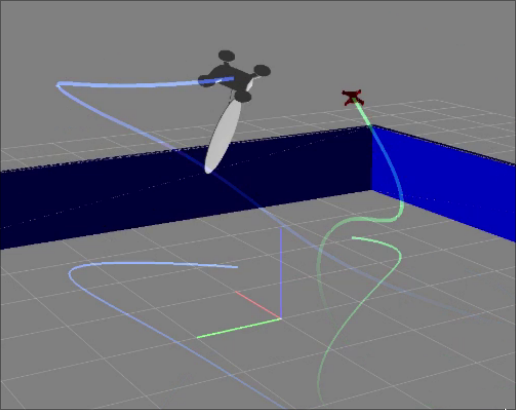
🚨 New Drone Simulator
[5.31.2026] Researchers release CrazyFlow - a GPU accelerated, differentiable simulator in JAX.
Benchmarked on a RTX4090:
> Parallel sim: ~700M steps/s at 1M worlds
> Max scale: 4.2M drones, 900M+ steps/s
> Gradients: 9M gradients/s through 10 sim steps
> Depth rendering: 350k frames/s at 64x64 over 1,024 envs
Read our 11 minute research note on the paper: https://t.co/OYXmRNQ6pt
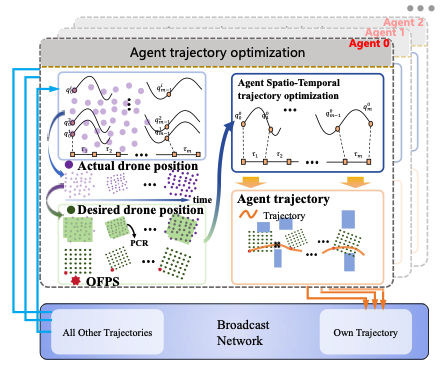
FLIP is a new swarm-planning method that keeps 100 drones coordinating in real time by treating formation changes like point-cloud registration
In the paper’s benchmark, FLIP planned for 100 drones in ~0.040s mean time, compared with ~0.933s for Zhou’s method and ~5.814s for Quan’s
The useful part is that it's fast enough for large swarms and resilient to single-agent failures or mid flights adaptations
Read our 12 minute notes: https://t.co/R5ySPsPGha
Or the original paper by Zhou, Xu, Hou, Hou, Gao, at:
https://t.co/Un1NY4ZKkH
New community hub just dropped for drone x ai enthusiasts
We'll be posting weekly:
> Changelogs
> SOTA research of the week
> Open sourced GitHub repos examples
Check it out:
https://t.co/NryQt53Mgq
Welcome to Droneforge Email Newsletter
We’re going to start covering:
> weekly app changelogs
> top drone research of the week
> tutorials and guides for Nimbus
Want to stay updated? DM us your email and we’ll add you to the list
DRONEFORGE 2.1.4 RELEASE
In our most anticipated update -- we expose a full python interface to program your FPV drones using our DF1 autonomy stack
Use our out-of-the-box autonomy stack to create your own AI drone missions
Check out our docs!
https://t.co/uNExT6PAql
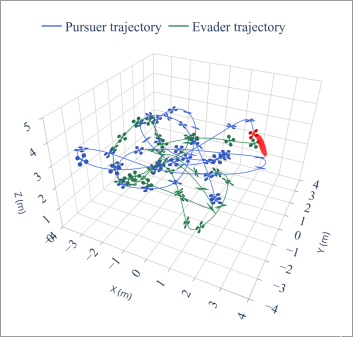
🚨 Adversarial RL for Drone Interceptors:
Competitive RL is being used to train drone interceptors against agile evasive drones
But instead of training only the interceptor (pursuer), this paper trains both sides.
1. The interceptor learns to catch
2. The evader learns to escape
Making autonomy adversarial pushes both policies to its limits. Both agents are trained inside a high-fidelity JAX quadrotor simulator running massive parallel rollouts
Results showed a successful transfer zero-shot to a real indoor flight arena, and caught the simulated evader 7 times in 28 seconds.
Paper: https://t.co/FZw2W7g6Uy
Droneforge is an ode to the goodness of robotics
To the celebration of accessibility and the powerful intelligence that will change the world for the better
🚨Awesome UAV Datasets
(specifically curated for training VLA's)
> Synthetic UAV Flight Trajectories — Hugging Face dataset with 5,000+ synthetic UAV trajectories over ~20 hours of flight time
https://t.co/EEPjciW8O2
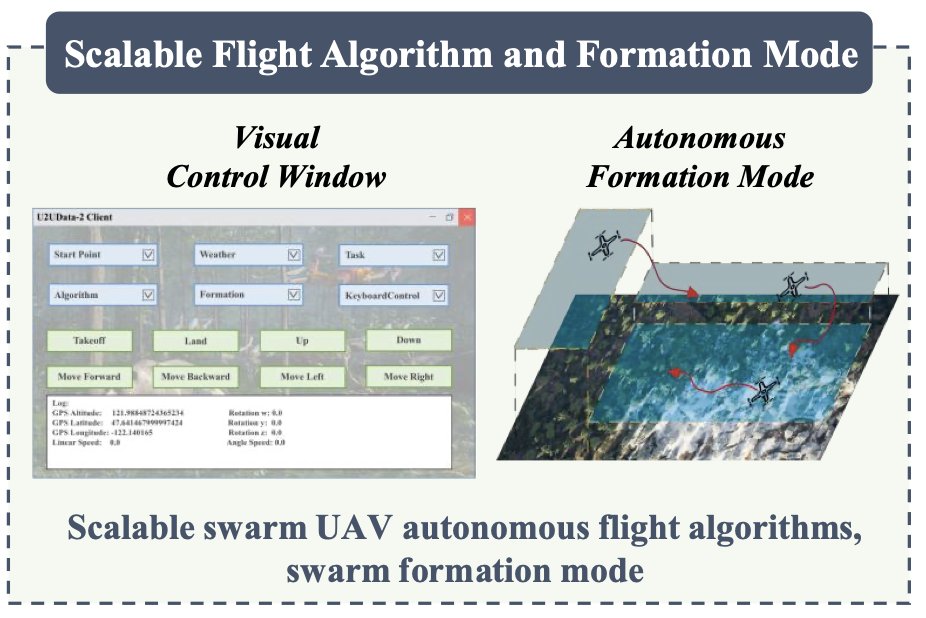
> U2UData+ / U2UData-2 — Large-scale swarm UAV autonomous flight dataset: 15 UAVs, 12 scenes, 720 traces, 120 hours, 600 seconds per trajectory, with RGB, depth/LiDAR, and environmental signals
https://t.co/mtgAiSq88l
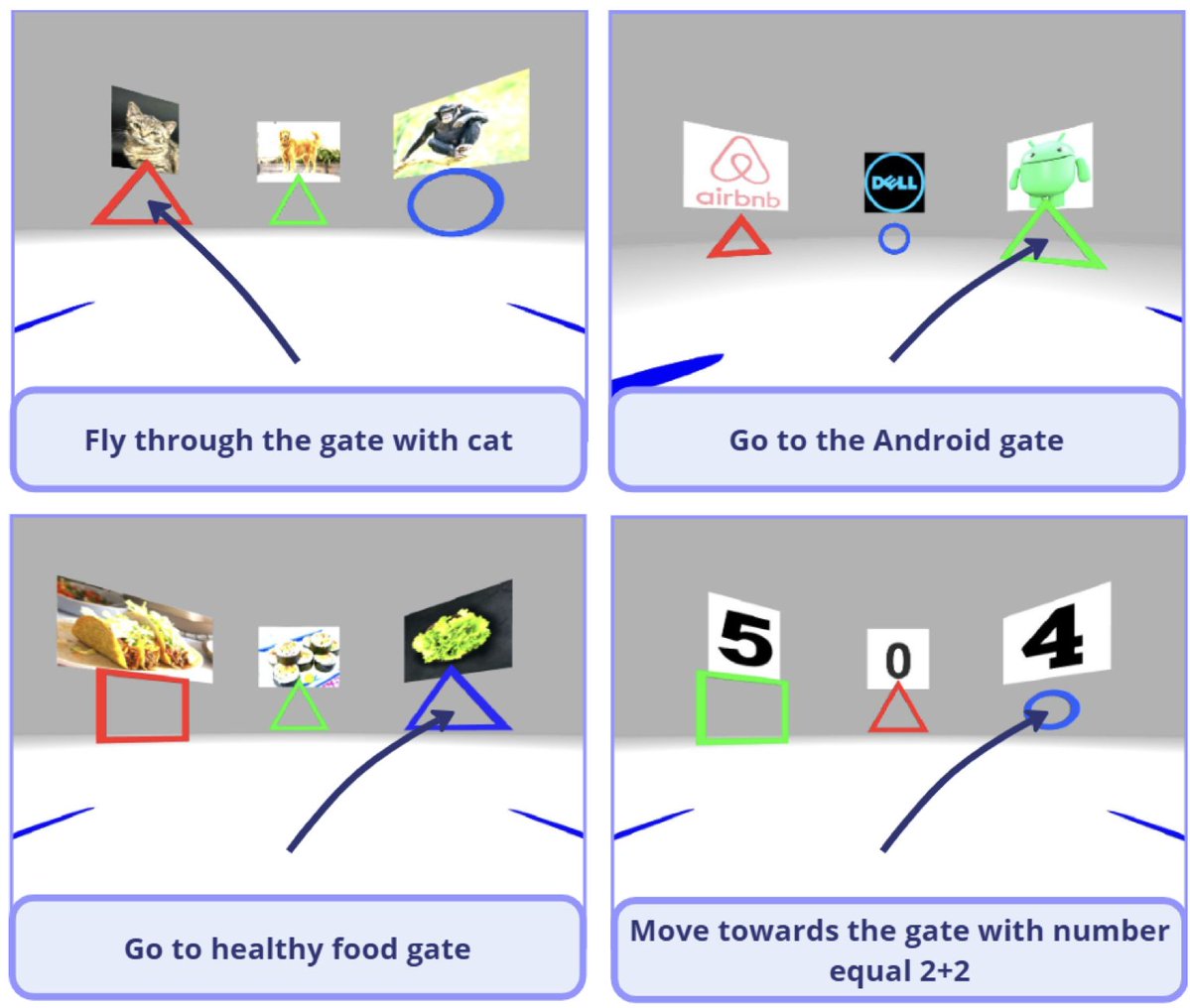
> CognitiveDrone Dataset — 8,062 simulated UAV flight trajectories for VLA-style drone control, split across human recognition, symbol understanding, and reasoning tasks
https://t.co/rzint94UhL
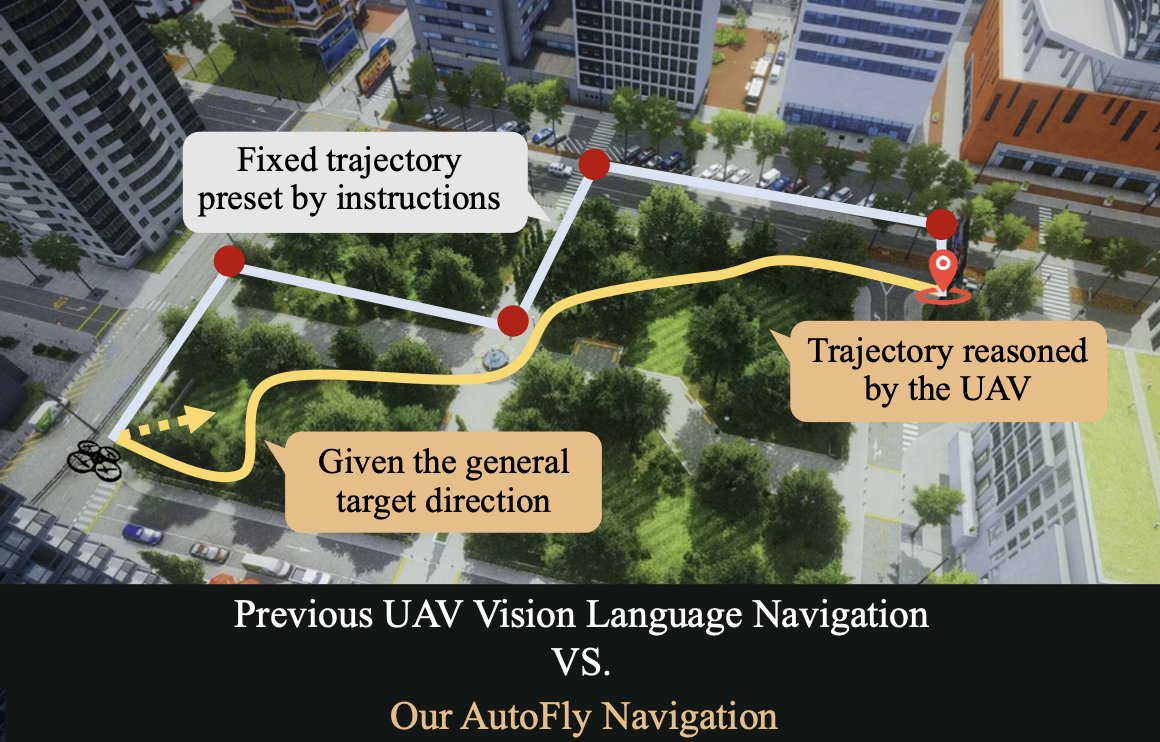
> AutoFly Dataset — VLA-style UAV autonomous navigation dataset with 13K+ episodes and 2.5M image-language-action triplets, built from expert demonstrations and simulated trajectories, plus 1K real-world flight episodes for sim-to-real validation
https://t.co/tNkh44ivC0
> UAV-Flow / UAV-Flow-Sim — Real-world language-conditioned UAV imitation-learning benchmark with 30,692 real UAV flight trajectories and 10,109 simulated trajectories, where each sample includes language instruction, egocentric visual observation, and 6-DoF UAV state/action trajectories
https://t.co/yRGwTT1eFE
@aussetg you can soon :)!
we are open sourcing our python library next week to create your own state estimation pipelines! would love to see what you can cook up

![droneforge's tweet photo. 🚨 New Drone Simulator
[5.31.2026] Researchers release CrazyFlow - a GPU accelerated, differentiable simulator in JAX.
Benchmarked on a RTX4090:
> Parallel sim: ~700M steps/s at 1M worlds
> Max scale: 4.2M drones, 900M+ steps/s
> Gradients: 9M gradients/s through 10 sim steps
> Depth rendering: 350k frames/s at 64x64 over 1,024 envs
Read our 11 minute research note on the paper: https://t.co/OYXmRNQ6pt](https://pbs.twimg.com/media/HJ_ARhfakAAxFIn.jpg)
![droneforge's tweet photo. 🚨 New Drone Simulator
[5.31.2026] Researchers release CrazyFlow - a GPU accelerated, differentiable simulator in JAX.
Benchmarked on a RTX4090:
> Parallel sim: ~700M steps/s at 1M worlds
> Max scale: 4.2M drones, 900M+ steps/s
> Gradients: 9M gradients/s through 10 sim steps
> Depth rendering: 350k frames/s at 64x64 over 1,024 envs
Read our 11 minute research note on the paper: https://t.co/OYXmRNQ6pt](https://pbs.twimg.com/media/HJ_AOV1bEAALs-q.jpg)














![droneforge's tweet photo. 🚨 New Drone Simulator
[5.31.2026] Researchers release CrazyFlow - a GPU accelerated, differentiable simulator in JAX.
Benchmarked on a RTX4090:
> Parallel sim: ~700M steps/s at 1M worlds
> Max scale: 4.2M drones, 900M+ steps/s
> Gradients: 9M gradients/s through 10 sim steps
> Depth rendering: 350k frames/s at 64x64 over 1,024 envs
Read our 11 minute research note on the paper: https://t.co/OYXmRNQ6pt](https://pbs.twimg.com/media/HJ_AUS7bAAATUo6.jpg)