After a long wait since our last announcement, OpenArm 2.0 is finally here.
We're expanding from a robotic arm into a standard evaluation environment for Physical AI research, anchored by OpenArm Cell.
- OpenArm Cell for reproducible eval
- New pinch-type end effector
- Standardized cameras
- Redesigned J5 wrist (natural teleop)
- VR teleop
- Long-term stable release
https://t.co/3UqDHm4qPE
After a long wait since our last announcement, OpenArm 2.0 is finally here.
We're expanding from a robotic arm into a standard evaluation environment for Physical AI research, anchored by OpenArm Cell.
- OpenArm Cell for reproducible eval
- New pinch-type end effector
- Standardized cameras
- Redesigned J5 wrist (natural teleop)
- VR teleop
- Long-term stable release
https://t.co/3UqDHm4qPE
OpenArm 2.0 is now shipping from WowRobo, starting at $6,500. V1→V2 upgrade kit from $1,080.
OpenArm Cell (from $6,200): A workspace with 300mm Z-axis, top camera, and lighting for reproducible embodied AI.
https://t.co/QZU8z79mbk
How do we make robot policy evaluation reproducible across labs?
Announcing OpenArm 02:
a fully open-source dual arm platform, with a unified setup for reproducible evaluation: controlled tasks, backgrounds, lighting, and camera angles.
✅ Fully open-source, so anyone can replicate the setup anywhere
✅ AutoEval: 24/7 real-world evaluation with minimal human intervention (building on work by @zhiyuan_zhou_)
✅ Fair side-by-side policy comparison
OpenArm is the open foundation to turn isolated results into shared progress.
Releasing soon. Stay tuned.
After a long wait since our last announcement, OpenArm 2.0 is finally here.
We're expanding from a robotic arm into a standard evaluation environment for Physical AI research, anchored by OpenArm Cell.
- OpenArm Cell for reproducible eval
- New pinch-type end effector
- Standardized cameras
- Redesigned J5 wrist (natural teleop)
- VR teleop
- Long-term stable release
https://t.co/3UqDHm4qPE
How do we make robot policy evaluation reproducible across labs?
Announcing OpenArm 02:
a fully open-source dual arm platform, with a unified setup for reproducible evaluation: controlled tasks, backgrounds, lighting, and camera angles.
✅ Fully open-source, so anyone can replicate the setup anywhere
✅ AutoEval: 24/7 real-world evaluation with minimal human intervention (building on work by @zhiyuan_zhou_)
✅ Fair side-by-side policy comparison
OpenArm is the open foundation to turn isolated results into shared progress.
Releasing soon. Stay tuned.
The @dimensionalOS team is adding OpenArm integration to their open-source robotics platform. Try pick & place, teleop, and RRT planning with OpenArm.
It's a work-in-progress feature branch and they're looking for early feedback.
https://t.co/UfMrp4rqh9
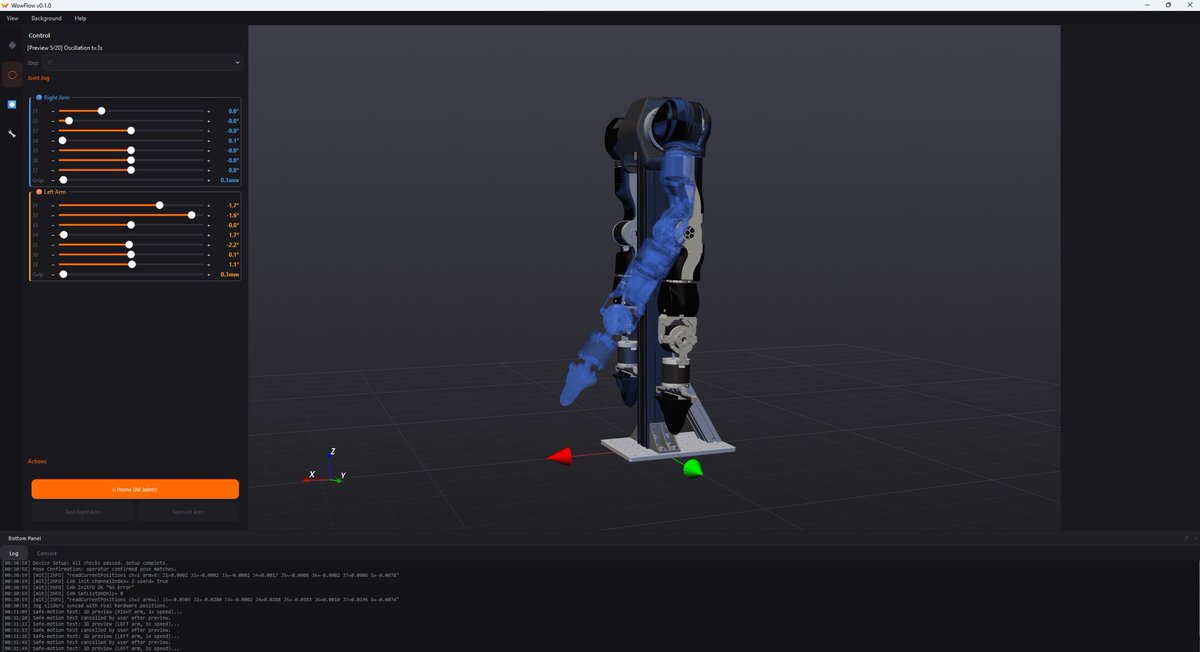
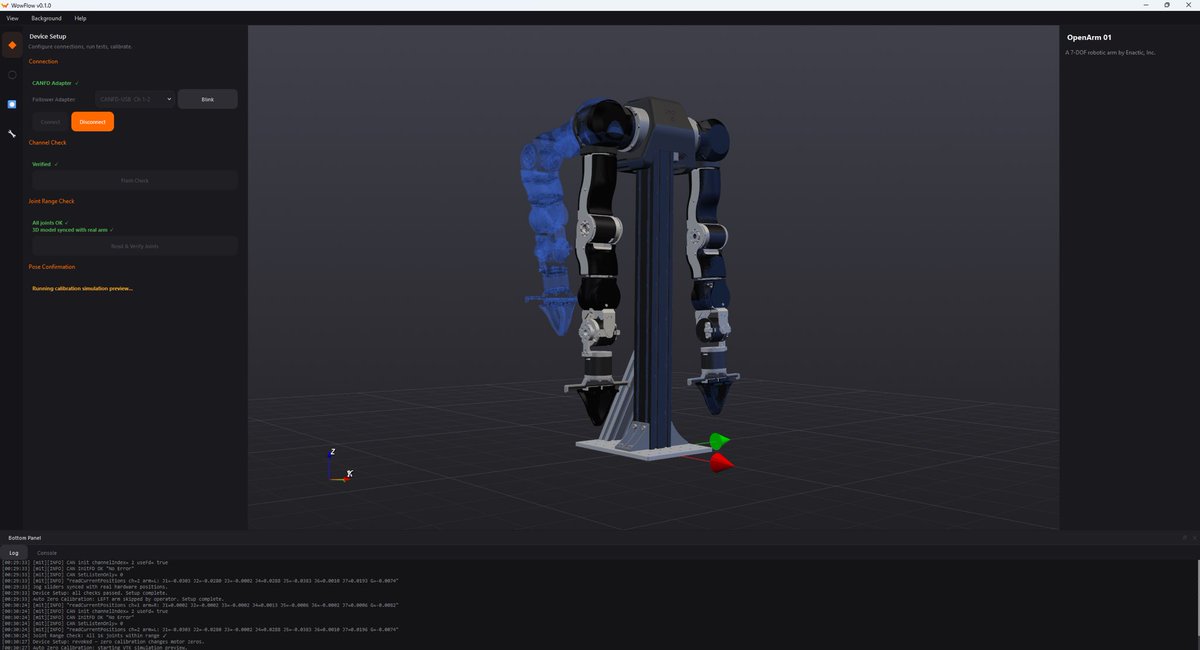
Announcing WowFlow 0.1.0.
A free Windows control layer for the OpenArm ecosystem, designed to make the workflow more accessible for Windows users.
From auto calibration to dataset recording and one-click upload to Hugging Face, WowFlow helps streamline the OpenArm + LeRobot workflow on Windows.
Show and Tell:
https://t.co/FOO2zZ7Aqr
A complete bimanual humanoid arm system, fully open-source, built for physical AI research in contact-rich environments.
@enactic_ai ’s OpenArm is a 7DOF arm with full CAD, firmware, control code, and simulation tools (MuJoCo, Isaac Sim) all openly available. High backdrivability, compliant joints, two-way force feedback for teleoperation and real-world data collection.
Tokyo-based, founded by CEO @hiro_yams.
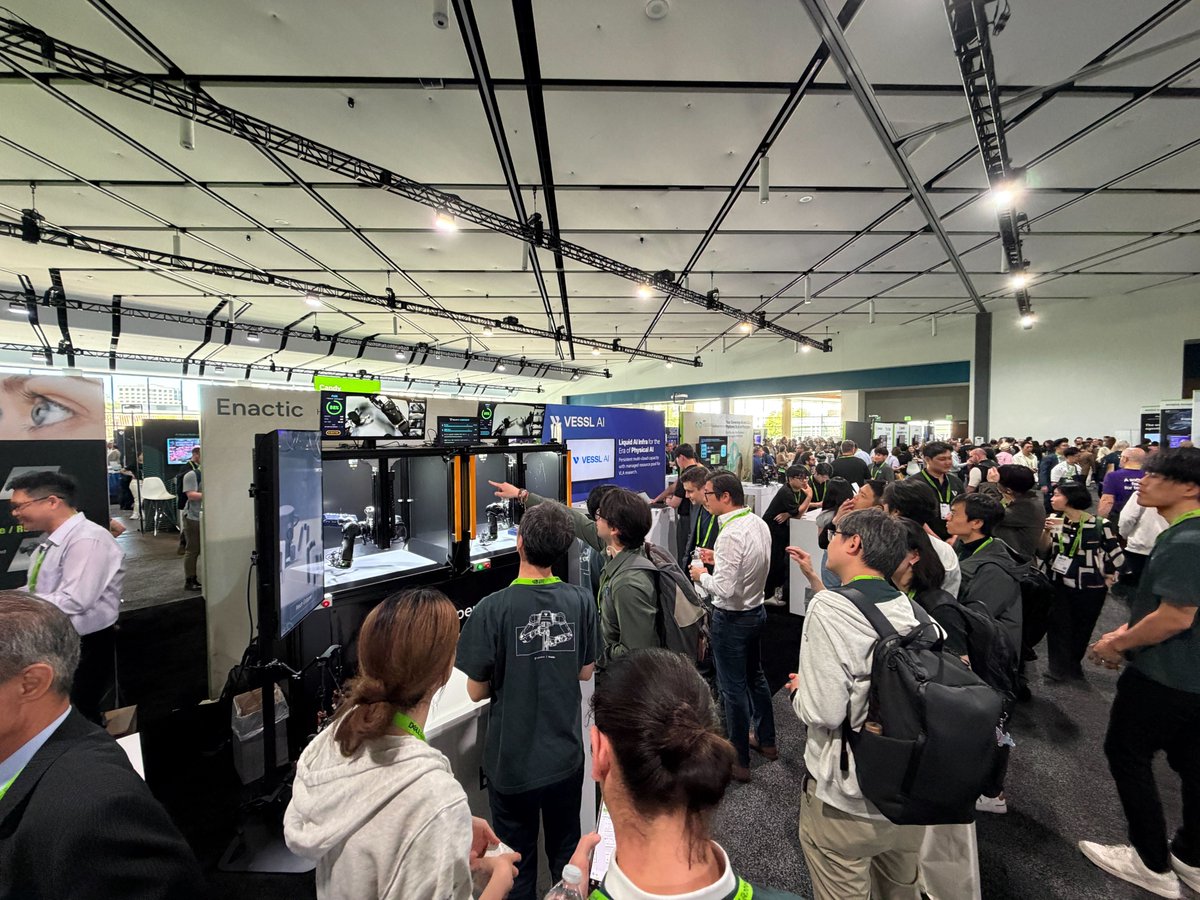
#NVIDIAGTC Day 1
Awesome to see so many people from robotics and AI stop by our booth.
We’re here all 4 days with OpenArm at booth 3418 near Inception area. If you’re a developer, researcher, or investor interested in what we’re building, come by or DM us.
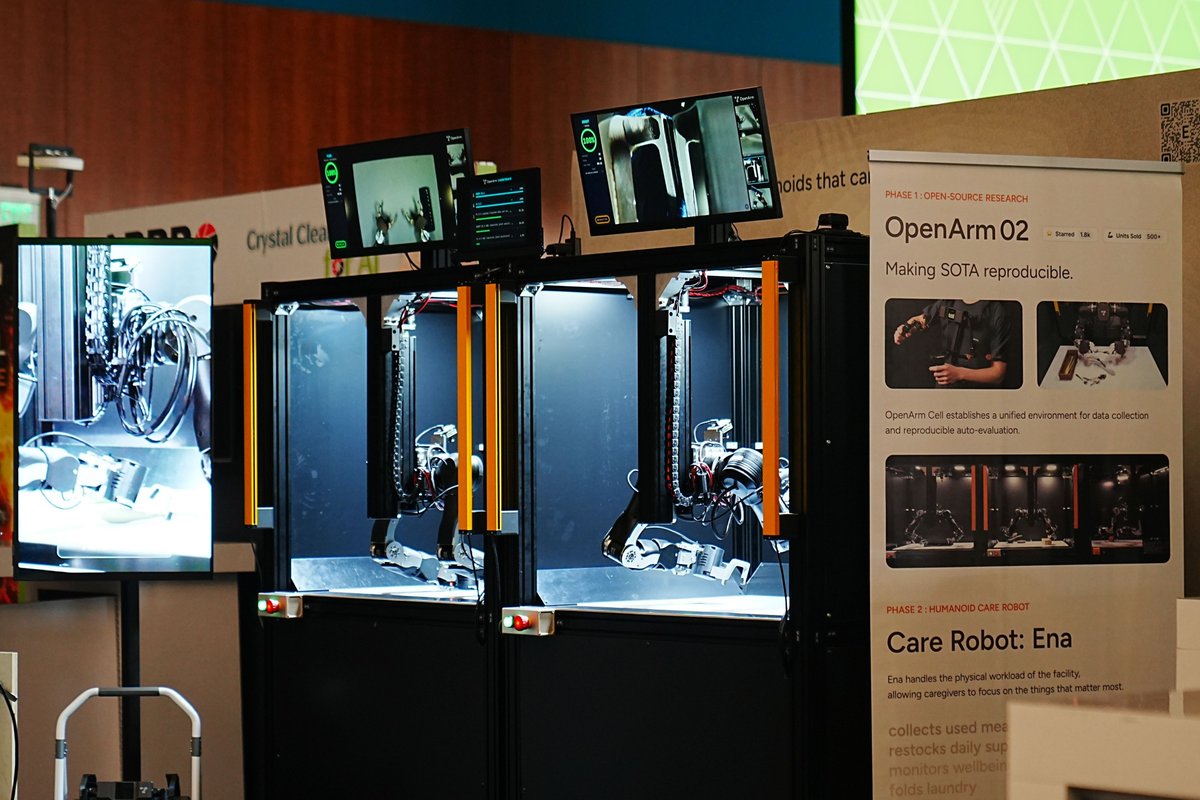
Make SOTA reproducible.
We're at #GTC2026, Booth #3418, showcasing OpenArm Cell — a standardized physical AI evaluation platform powered by OpenArm, the fully open-source 7-DOF humanoid robot arm.
Reproducible. Open. Ready for the age of physical AI. 💪
#OpenArm#Robotics #PhysicalAI #OpenSource #HumanoidRobotics #NVIDIAGTC