Real-time social robotics, from the cloud to your local device.
Watch Ian from our DevX team use Gemini Live for a seamless voice chat with Reachy Mini.
Then, stick around until the end to see the robot running locally on Gemma 4!
At Google I/O today?
Stop by the Gemma Playground and chat with our Gemma 4-powered Open Duck robot! 🤖🦆
Not on site? No problem! You can 3D print your own at home.
The bottleneck for most people who want to build a robot isn't motivation
it's not knowing where to start
what parts. what order. what software stack.
Tnkr solves exactly that — open source robot projects with step-by-step assembly, CAD, firmware, everything
https://t.co/Q2fS0D2lyU
Build a humanoid robot yourself! 🪚
OpenArm is an open-source humanoid robot.
It comes with full CAD, control code, firmware, and simulation tools, everything needed to build, modify, and operate it.
The arms are designed to be compliant and backdrivable. Teleoperation is supported, with force feedback and real-time gravity compensation so operators can guide the arm naturally.
Super important, on the simulation side, OpenArm works with platforms like MuJoCo and Isaac Sim, letting developers test policies in virtual environments before running on hardware.
Assemble it yourself from a kit or get it prebuilt, the goal is accessibility for research labs, small teams, and enthusiasts.
The project is run by Enactic in Tokyo, Japan, and aims to lower the barrier for experimenting with dexterous manipulation. 🇯🇵
Let's put robotics in mainstream! 🔥
Here's the project page: https://t.co/nobCESiTMV
~~
♻️ Join the weekly robotics newsletter, and never miss any news → https://t.co/GoA3ZuwoPB
🚀Our New Paper on Open-Source Bipeda Robot MEVITA is out!
All components can be procured through e-commerce, and the robot is built with a minimal number of parts.
All hardware, software, and learning environment are released as open source.
🌐 https://t.co/F1prgZHZOu
Thread👇
R3F-VFX Tutorial !
In this video you'll learn how to use r3f-vfx, and how to include it inside your project.
The workflow is simple : design your particle with <VFXParticles debug /> with the editor, copy the jsx.
Add texture, colorNodes or TSL node you want to use to your particle system.
Once you're happy with how your particles looks : you can use the useVFXEmitter hook to spawn particles wherever you want from any component you want, in 2 lines it's done.
or use the <VFXEmitter /> (thanks @wawasensei for the inspo) component inside a 3D component.
The VFXEmitter is affected by the world transform of it's parent, add the localDirection prop to keep the direction and rotation of the VFXEmitter local to its parents.
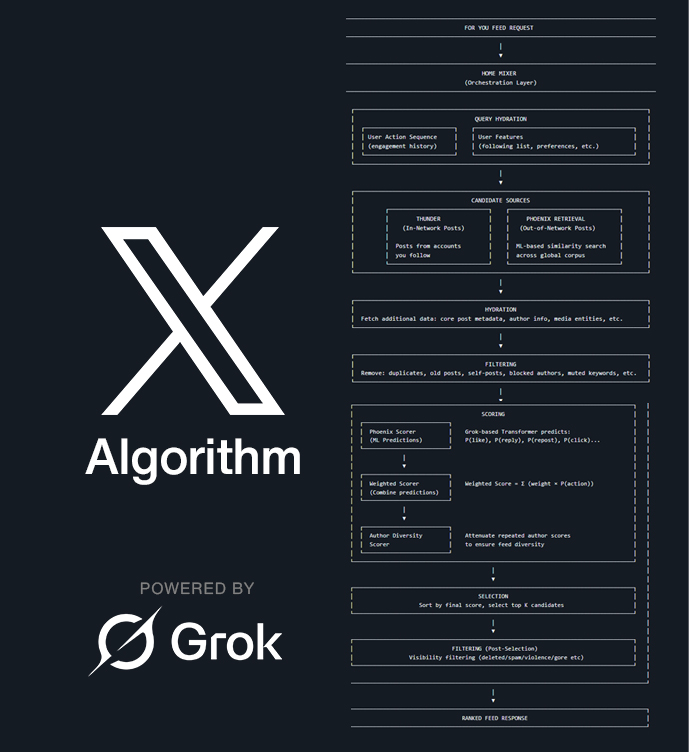
BREAKING: 𝕏 has open sourced its For You feed algorithm, the same production system running today and powered by Grok from xAI. The full code is live on GitHub and will be refreshed every 4 weeks.
Your feed blends posts from accounts you follow with posts discovered across all of 𝕏, then ranks them using a Grok based transformer that predicts how likely you are to like, reply, repost, click, or watch. Instead of one simple score, the model predicts many actions and combines them for a more nuanced ranking.
Everything learns directly from user behavior. Intelligence lives inside the model, not scattered pipelines. The system is modular, transparent, and stable, with each post scored independently so results are cacheable and consistent.
This is one of the most open looks ever at a large scale social feed ranking system.
And new devlog!
👉 https://t.co/Zgxk7HHufB
Did you think I'd stop since the portfolio is out??
I intend to finish the series, and this got to be the biggest devlog I've made so far.
In this episode:
- A bunch of updates
- 4 new areas