Pyribs v0.8.0 is now available! @pyribs v0.8.0 adds support for new algorithms (Novelty Search, BOP-Elites, and Density Descent Search), while making it easier than ever to design new ones 🧠 Here are the highlights 🧵
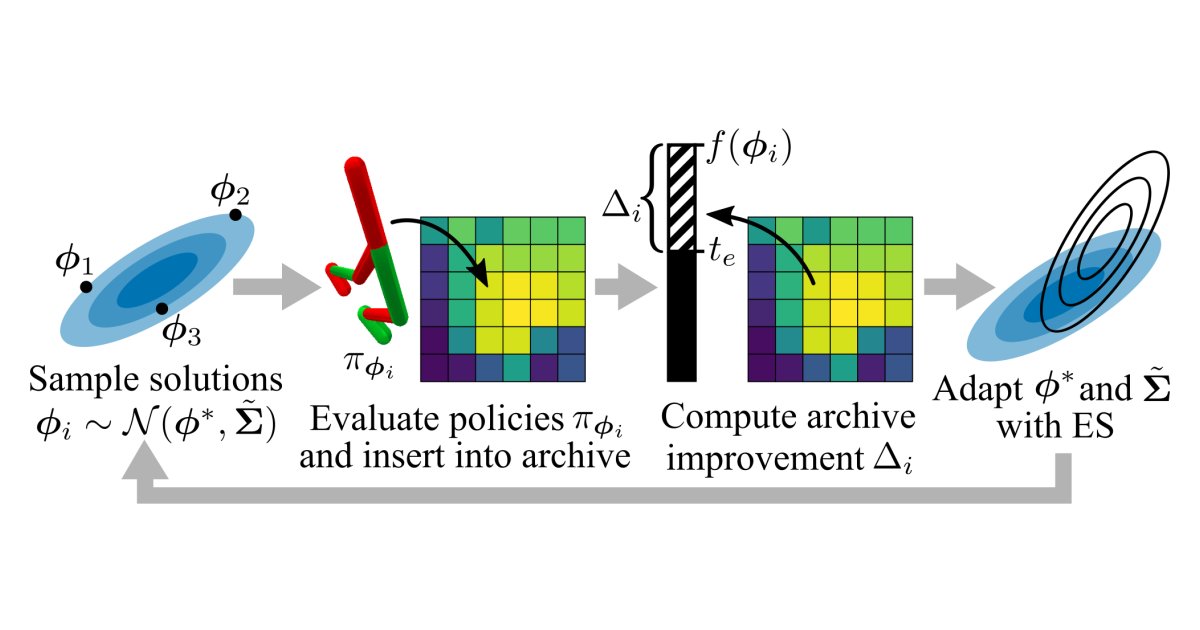
Excited to share my new work on extending the SOTA QD algorithm CMA-MAE to multi-objective optimization, done in collaboration with @snikolaidis19 and with valuable insights from @tehqin17. It will be presented at GECCO 2025 🎉 [1/8]
arXiv: https://t.co/cuBJWqRM6U
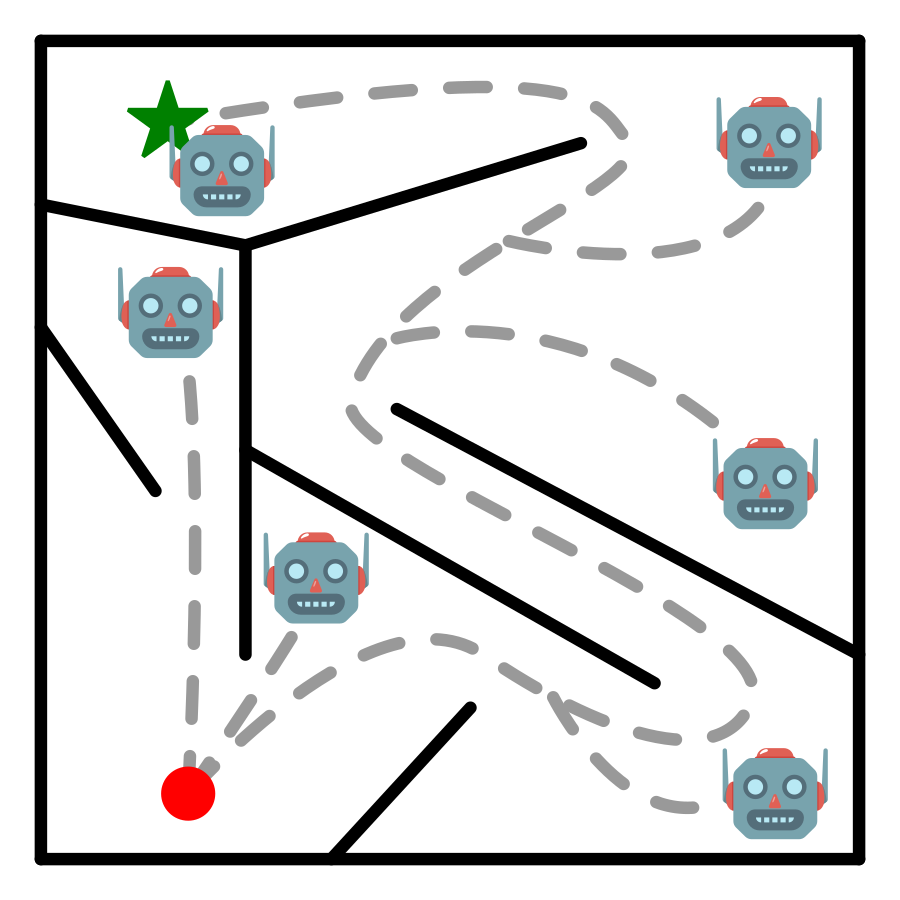
User-aligned robot representations are best learned from user data, but how do we collect this data without onerous labeling processes?
We can learn from data that users are ✨intrinsically motivated✨ to produce through exploratory search 🔎!
🧵1/6
Congratulations @snikolaidis19 for receiving an Okawa Foundation Research Grant for his pioneering work in "simulating diverse human behaviors for robust human-robot interaction" 👏
@OkawaFoundation@USCViterbi @USCAdvComputing
This review paper summarizes part of the work done in the ICAROS lab over the past few years, placing it within a general framework and highlighting future directions: https://t.co/gbU9oJrp1b
As AI becomes more ubiquitous, human-AI collaboration will become more important than ever. Our invited speaker, Stefanos Nikolaidis @snikolaidis19, professor at @USC, is a key innovator in this area, especially with respect to human-robot collaboration.
To evaluate arm non-use in affected limbs of hemispheric stroke recovery patients undergoing rehabilitation, researchers created a new robot-based clinical quantification metric. @ndennler@snikolaidis19@icaroslab@USC
Read more in Science #Robotics: https://t.co/ud2E4UUNQz
I'm excited to announce my work with @snikolaidis19 on Covariance Matrix Adaptation MAP-Annealing has been nominated for best paper in the EML track @GeccoConf 2023!
abs: https://t.co/9Y8kHsQ43H
pdf: https://t.co/UWrG33RbR3
code: https://t.co/2mRkmuSIHj
Big congratulations to @CSatUSC PhD student Nathan Dennler and his @QueerinAI co-authors who recently won the best paper award at the ACM @FAccTConference! 🏳️🌈
Read Nathan's story 👉 https://t.co/2b6b88oWol
@USCViterbi@icaroslab
Excited to share a new paper “Multi-Robot Coordination and Layout Design for Automated Warehousing” with @tehqin17, @vbhatt_cs, @snikolaidis19, @JiaoyangLi9, accepted as a full paper in @IJCAIconf!
arXiv: https://t.co/0mD0tfTxQq
Code: https://t.co/HdgNEUAEKA
We are excited to announce the first workshop on Environment Generation for Generalizable Robots (EGG) at #RSS2023 (https://t.co/QDUtyWWxPC)! Consider submitting if you are working in any area relevant to environment generation for robotics. Submissions due on May 17, 2023, AoE.
Honored to be one of the three finalists of the Bodossaki Foundation @bodossaki Distinguished Young Scientists Award in Applied Science and congrats to @syrgkanis for winning!
Rather than learning user preferences from demonstrations on an actual task, we can learn informative preference priors from demonstrations on a shorter, canonical task! Very nice article about this work: https://t.co/9K5DSx2b0B
We are excited to announce the release of @pyribs v0.5.0! Pyribs v0.5.0 brings a slew of new features, tutorials, and improvements!
Installation: pip install ribs (our Conda package will be ready in a week or two)
Website: https://t.co/a8oLLICoR7
GitHub: https://t.co/0ufRXe01IO
The USC REU Site in Robotics and Autonomous Systems in now accepting applications! The 10-week summer research program is fully funded and it will include a trip to NASA JPL and other social events https://t.co/PGiVcVmiSa
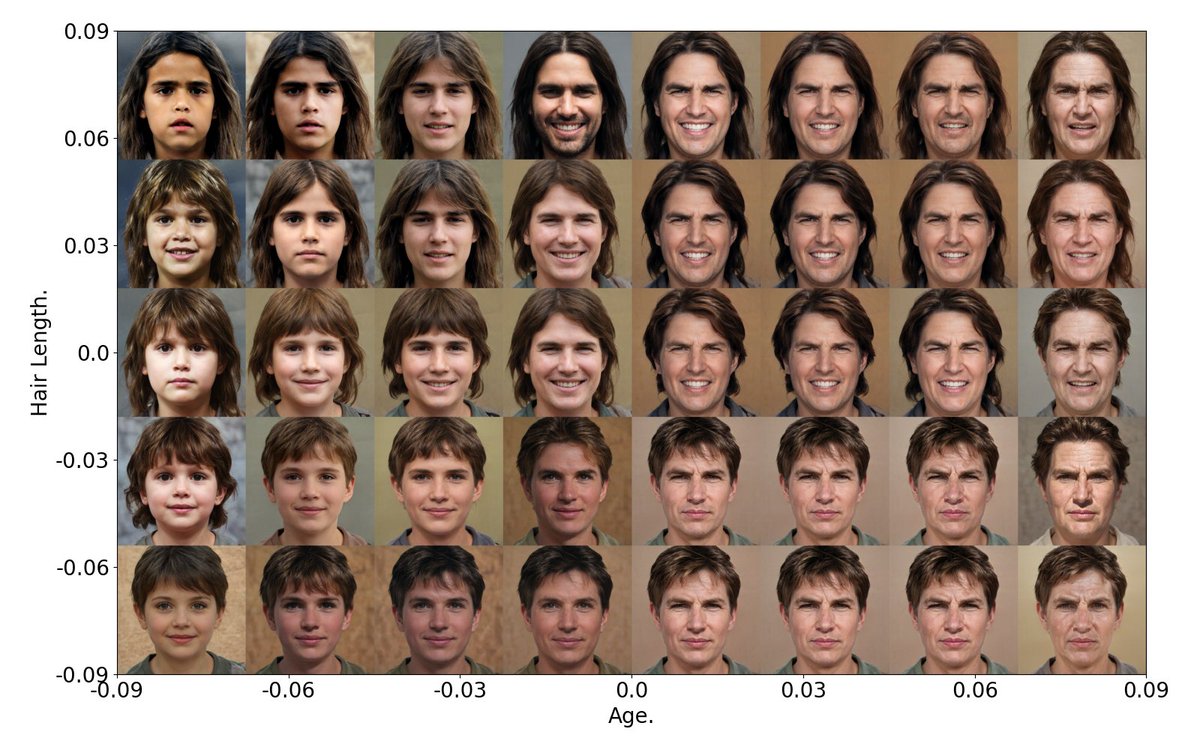
Excited to share work with @tehqin17@AniruddhaKalkar@snikolaidis19 “Training Diverse High-Dimensional Controllers by
Scaling Covariance Matrix Adaptation MAP-Annealing”
arXiv: https://t.co/GKSVwnfu5S
Supplemental Website: https://t.co/bT8NxUacgE
Code: https://t.co/s4Dk0oDjFc
I am thrilled to be appointed as a Fluor Early Career Chair @USCViterbi! Thanks to my amazing students @icaroslab, whose work this recognition celebrates.