I have never felt so shaken.
Children are dying of hunger. Falling one after another, like petals of a dying flower. Under our watch.
How do you sleep, Presidents, Foreign Ministers, political leaders, diplomats, civil servants - doing nothing to stop Israel’s starvation campaign?
PS: Talking politics while dodging genocide perfectly meets the definition of doing nothing.
@jianyuan_wang@riverakid1@Vinc3nt_Leroy Thanks Jianyuan. It’s nice to see there’s a sort of convergence in 3d vision towards scalable learning-based methods, and of course I’m not only talking about dust3r-like methods. One recent paper that blew my mind is rayzer 👇
RGB-SLAM becomes a single forward through the network with no optimization needed. We still need to only keep keyframes to avoid exploding the costs. We simply check the 3D overlap between views and memory, ensuring new keyframes discover enough novel content...
*3R posts are back! 🧵
Interested in SfM, RGB-SLAM or... both at the same time???
Come see MUSt3R @CVPR25 Friday morning, ExHall D Poster #82.
Jerome and Boris will be there to present how we can adapt DUSt3R to multiple views via a memory mechanism (and maybe do parkour?!)
A teaser of the latest 3D DUSt3R based models we’re presenting at @cvprconference
Discover MUSt3R & Pow3R, universal encoder DUNE + research in navigation, vizloc, segmentation & human motion understanding!
All our #CVPR2025 papers are here
➡️ https://t.co/0tm1FEiNOG
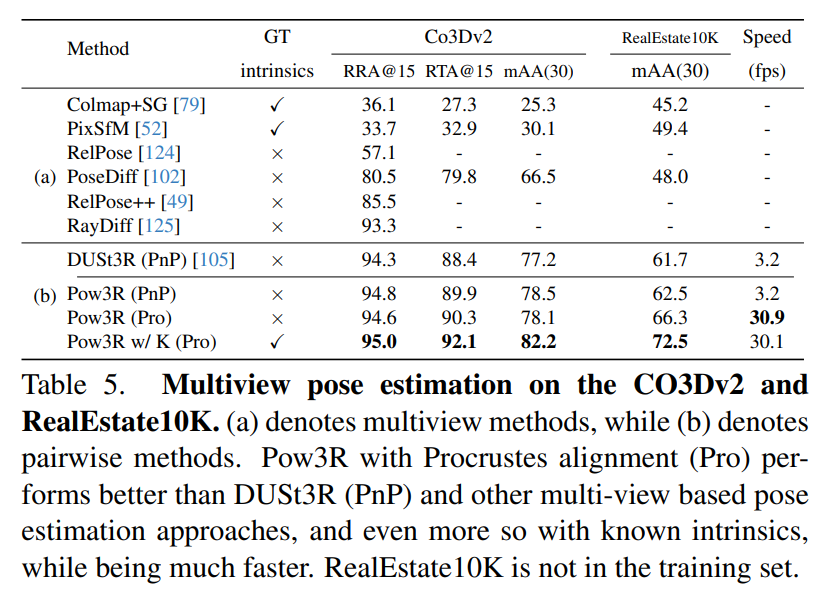
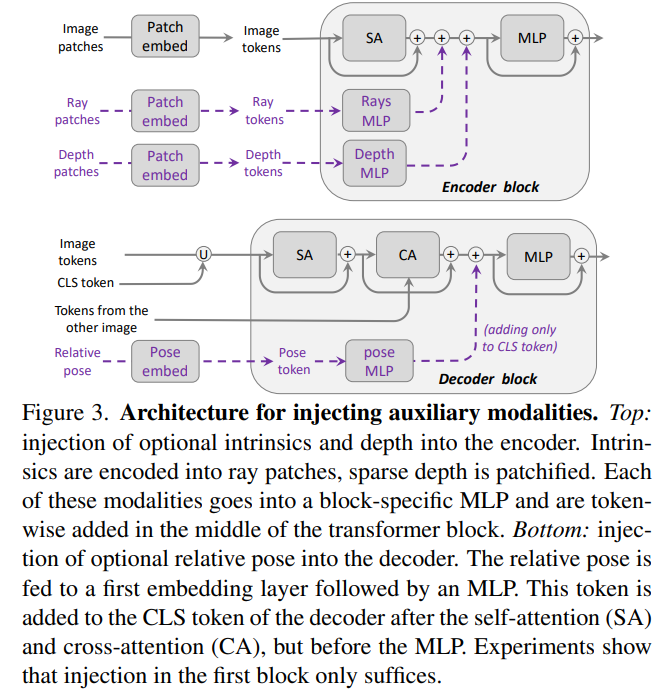
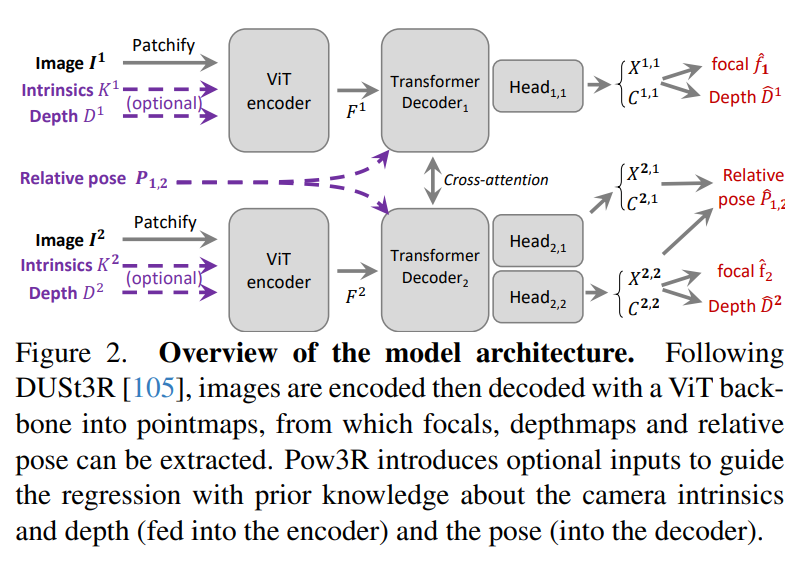
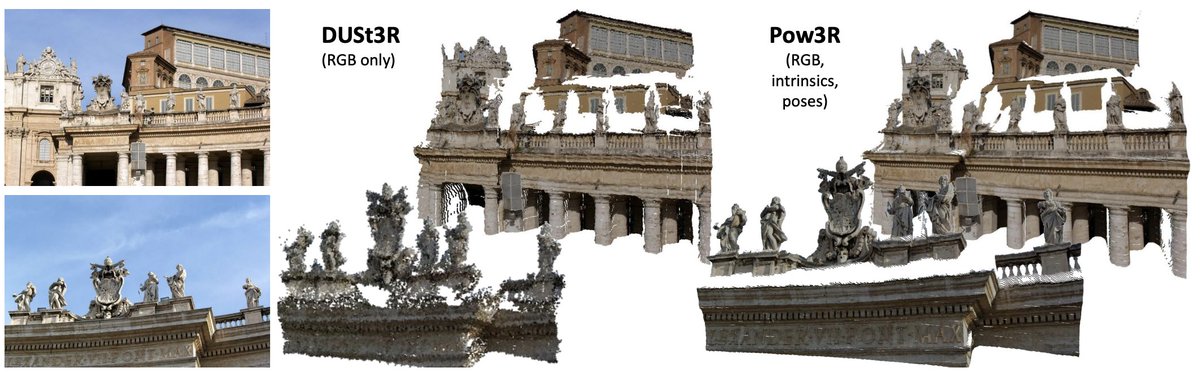
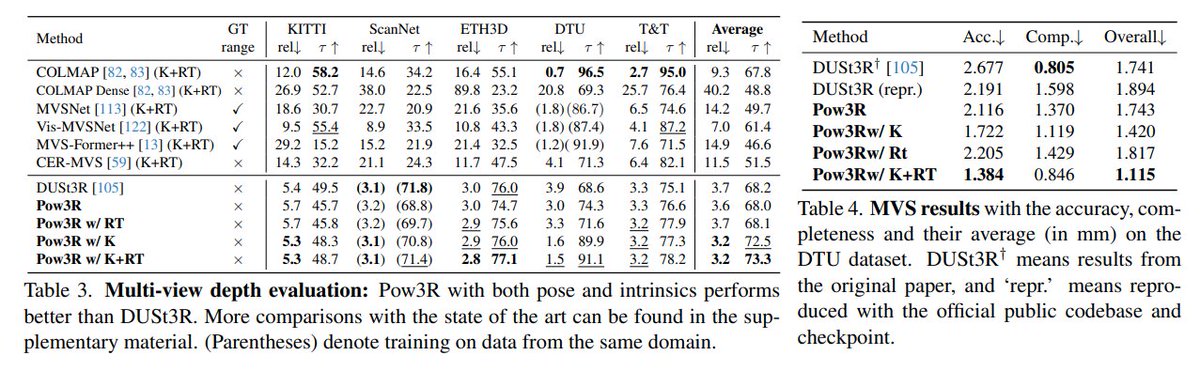
Happy to introduce our new CVPR paper—Pow3R: Empowering Unconstrained 3D Reconstruction with Scene and Camera Priors : https://t.co/i9nvnhHxbE
Inspired by the amazing DUSt3R, which reconstructs 3D from just two unposed images, we explored:
(1/n)
Pow3R: Empowering Unconstrained 3D Reconstruction with Camera and Scene Priors
@wbjang11, @WeinzaepfelP, @Vinc3nt_Leroy, @LourdesAgapito, @JeromeRevaud
tl;dr: DUSt3R with any optional input subset of camera intrinsics, pose and depthmaps
https://t.co/lmE3bXbPmA
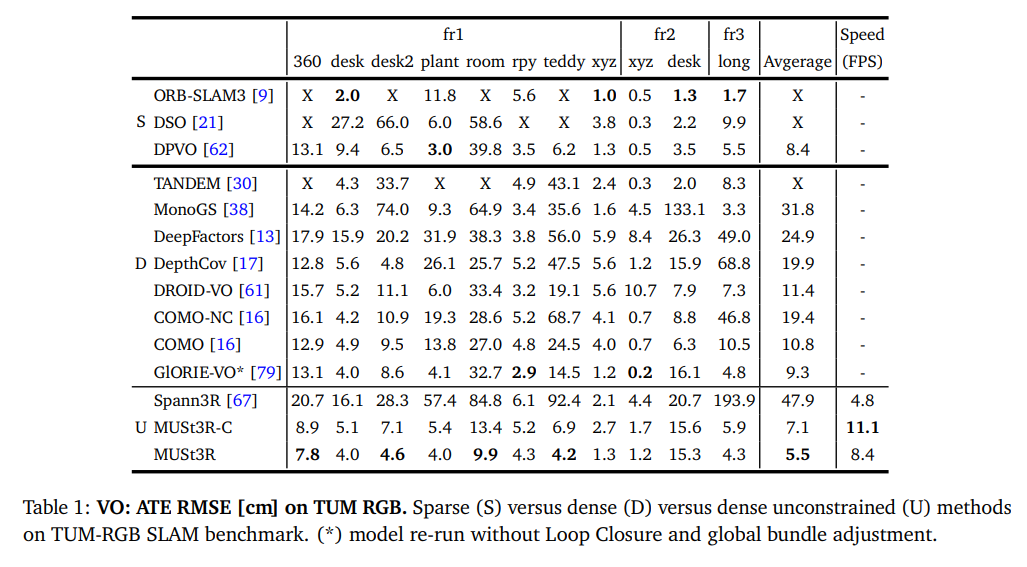
MUSt3R: Multi-view Network for Stereo 3D Reconstruction
Yohann Cabon, Lucas Stoffl, Leonid Antsfeld, @kgcs96, Boris Chidlovskii, @JeromeRevaud, @Vinc3nt_Leroy
tl;dr: make DUSt3R symmetric and iterative+multi-layer memory mechanism->multi-view DUSt3R
https://t.co/ncXvEsZvZC
MASt3R-SLAM: it's easily the most robust dense monocular SLAM system I've ever seen, and also very accurate. Real-time, RGB only (no IMU), handles unknown focal length and zoom. More new videos coming soon @eric_dexheimer@rmurai0610. Paper and full info: https://t.co/pYL4U4LMIn
🚀 Our NeurIPS '24 work, Large Spatial Model (LSM), is here! LSM performs semantic 3D reconstruction in just 0.1s, processing unposed data via feed-forward 3D reconstruction.
👉It leverages large-scale 3D datasets with minimal annotations, defining a 3D latent space. We are continuously exploring how this explicit 3D representation can further enhance reasoning and robotic learning.
🔗 Try our online Gradio demo with your own data at https://t.co/FjGsPkcJ6h
#NeurIPS2024 #3DReconstruction
We presented the poster at the eXCV workshop at #ECCV2024 . Thank you to people stopping by. If you missed it and you are interested in explainability in CV (#xAI) here is our poster.