#CoRL2024 accepted!! Theia: Distilling Diverse Vision Foundation Models for Robot Learning.
Theia is smaller but more powerful than off-the-shelf vision models in robotic tasks, and can generate features of SAM and DINOv2!
Code, demo: https://t.co/qVzABVyjB8
Thank my co-authors!
✈Two days to go for #CoRL2025! Some tips for the participants:
Venue information: https://t.co/13RQreuOLi
Local tips: https://t.co/m2WuUi8otd
Map for main program: https://t.co/YXRRsfKoPr
Map for workshop: https://t.co/1kQ24esgtU
Registration kiosk opens at 7AM.
Safe trip!
🎤Free K-Pop Concert Tickets for #CoRL2025 Attendees! Yeongdong-daero K-POP Concert will be right next to our venue on Sep 27, from 7-9 PM. We have 300 complimentary tickets available at the registration desk starting at 12PM Sep 27, on a first-come, first-served basis.
Reinforcement learning is used to speed the production of behavior for the @BostonDynamics Atlas humanoid robot. At the heart of the learning process is a physics-based simulator that generates training data for a variety of maneuvers.
Unitree H1: Humanoid Robot Makes Its Debut at the Spring Festival Gala 🥰
Hello everyone, let me introduce myself again. I am Unitree H1 "Fuxi".
I am now a comedian at the Spring Festival Gala, hoping to bring joy to everyone.
Let’s push boundaries every day and shape the future together.
#Unitree #HumanoidRobot #AI #Dance #SpringFestivalGalaRobot #SpringFestivalGala
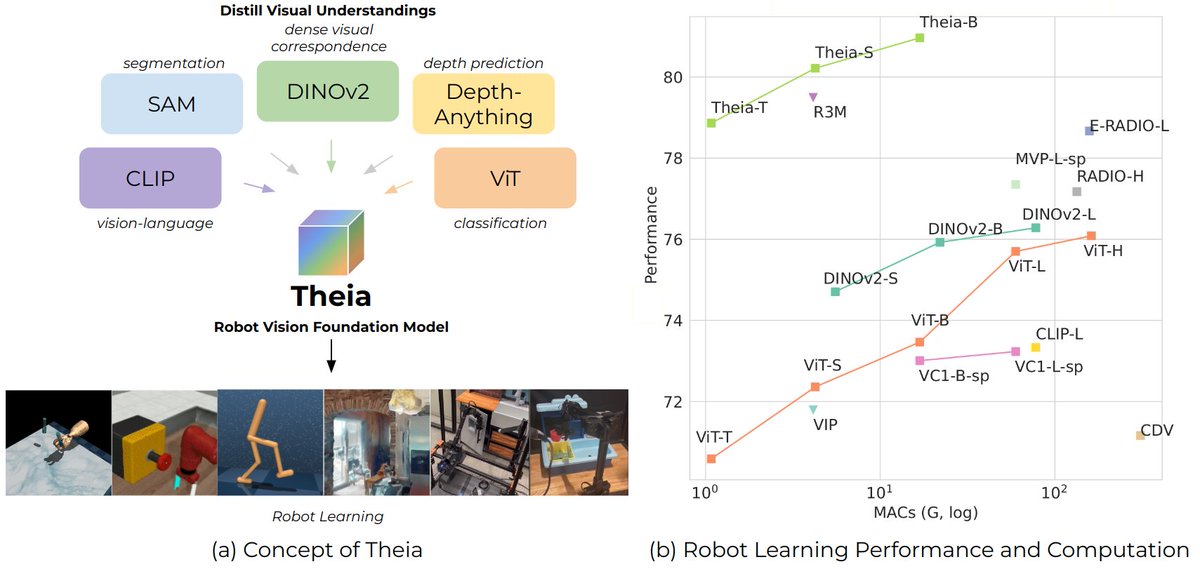
Introducing Theia, a vision foundation model for robotics developed by our team at the Institute. By using off-the-shelf vision foundation models as a basis, Theia generates rich visual representations for robot policy learning at a lower computation cost. https://t.co/aTy77T5xfT
I am extremely pleased to announce that CoRL 2025 will be in Seoul, Korea! The organizing team includes myself and @gupta_abhinav_ as general chairs, and @JosephLim_AI, @songshuran, and Hae-Won Park (KAIST) as program chairs.
Our team is presenting work at the Conference on Robot Learning, @corl_conf, in Munich, Germany this week! Learn more about our accepted research — https://t.co/438na24z7y
Our team has arrived in Munich and we're thrilled to present this work at the LangRob Workshop @ #CoRL2024 as a spotlight presentation on Nov. 9 morning. Stay tuned!
Introducing AdaCache, a training-free inference accleration method for video DiTs. It allocates compute tailored to each video generation, maximizing quality-latency trade-off.
project-page: https://t.co/Q1tV68wTUX
code: https://t.co/chP3Oga68c
arxiv: https://t.co/9bILtc4Cw7
#CoRL2024 accepted!! Theia: Distilling Diverse Vision Foundation Models for Robot Learning.
Theia is smaller but more powerful than off-the-shelf vision models in robotic tasks, and can generate features of SAM and DINOv2!
Code, demo: https://t.co/qVzABVyjB8
Thank my co-authors!
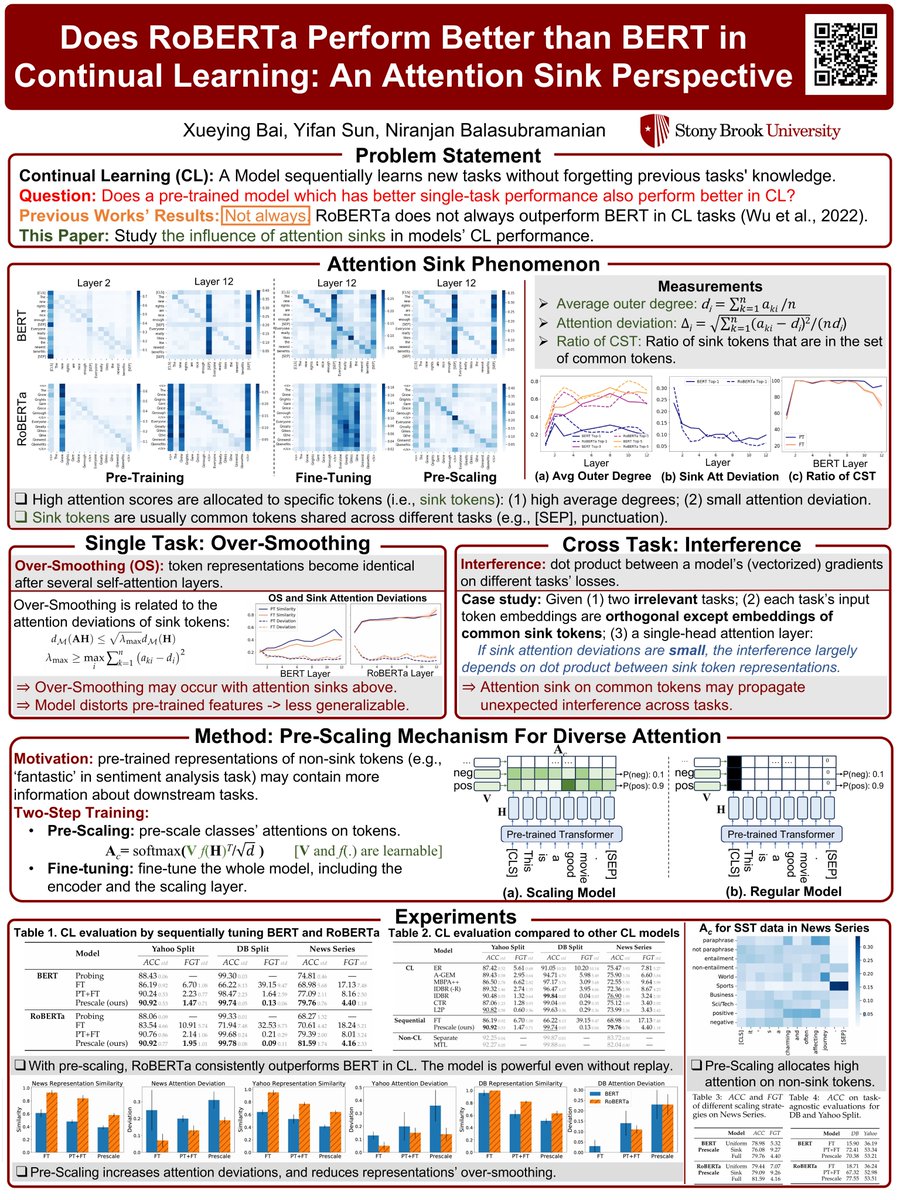
We will present our #COLM2024 paper, Does RoBERTa Perform Better than BERT in Continual Learning: An Attention Sink Perspective, on Monday 11:00 AM – 1:00 PM at #20 Poster Area. Please stop by if you are interested!
Paper: https://t.co/WS447FwRAf
Code: https://t.co/Yct3o5rgk5
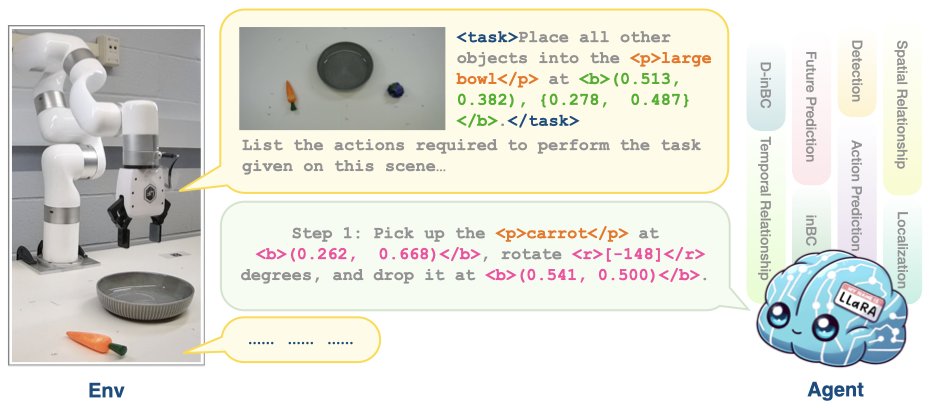
🚀 Excited to share our latest project: LLaRA - Supercharging Robot Learning Data for Vision-Language Policy! 🤖✨
We create a framework to turn robot expert trajectories into conversation-style data and other auxiliary data for instruction tuning. More details to come! (1/N)
#NeurIPS2023 🔔
Wondering an agent can learn how to see 👀 to help act 🦾? Come to see our #ActiveVision#RL with great potential!
Time: Thursday, Dec 14 10:45 - 12:45 CST
Venue: Great Hall & Hall B1+B2 (level 1) #1501
Everything: https://t.co/9LM0WrCpyo