Can neural networks reason like pointcloud registration algorithms?
Excited to share our latest paper, "NAR-*ICP: Neural Execution of Classical ICP-based Pointcloud Registration Algorithms", with @PetarV_93, @d_d_martini, and @kula78!
https://t.co/DuEwZvbvLb
More info below 🤖
Today, CRG and @MRG_Oxford were on Broad Street demonstrating the ongoing RobotCycle project which is measuring cyclist safety around Oxford!
More info: https://t.co/koOjkEOtOp
Project leads:
@panefimia@d_d_martini
Listening to @MichaelGroom16 giving a great talk on #safety for mobile manipulation for domestic robots at the @Dyson Institute of Engineering and Technology (https://t.co/wQVhR1G97e) at the AI and the Future of Engineering Symposium 2024.
The fabulous Jo-Ann Pattinson (https://t.co/NZwaiD5c2c) presented her #tas_rails work focussing on legal issues around #responsibleAI at the workshop on #NavigatingResponsibility (https://t.co/YeGNERl8Ww) organised by the @tas_hub Computational Agent Responsibility project.
Excellent talk by Dr. Jo-Ann Pattinson (@ITSLeeds) about legal implications of AI-generated evidence for motor vehicle accident disputes
Last week, research fellows on our funded RAILS project attended the Trustworthy Autonomous System (TAS-R) workshop at the University of Leeds
🚗 Today at IEEE IV 2024, Samuel Sze presented his paper, "Real-time 3D semantic occupancy prediction for autonomous vehicles using memory-efficient sparse convolution" 👏
📚 Check it out here: https://t.co/nIpSGWo9mi
#IV2024#IEEE#semanticsegmentation
📢 Live from Jeju Island, South Korea:
Two of our students, Benjamin Hardin @b_b_hardin and Samuel Sze are at the 2024 IEEE Intelligent Vehicles Symposium this week to present their work!
At today's sessions they presented two papers👇🧵
#IV2024#remotedriving#cyclistsafety
Catching @kula78's engrossing talk Making Robots Explainable and Trustworthy at the Actionable Knowledge Representation and Reasoning for Robots (AKR³) workshop #ESWC2024
Lars Kunze from Bristol / Oxford Robotics Institute in Action, giving a keynote at the workshop on Actionable Knowledge Representation for robots, collocated with @eswc_conf 2024. https://t.co/NhXV7Bx1BB
Thanks @BristolRobotLab for coming to visit yesterday! We loved all the questions and discussions. It was a great chance to share highlights from our research and demonstrate some of the new robots about the lab!
Very cool and much needed work on #causal learning & reasoning for robotic manipulation tasks by Maximilian Diehl and @KarinneRamirezA at #ICRA2024
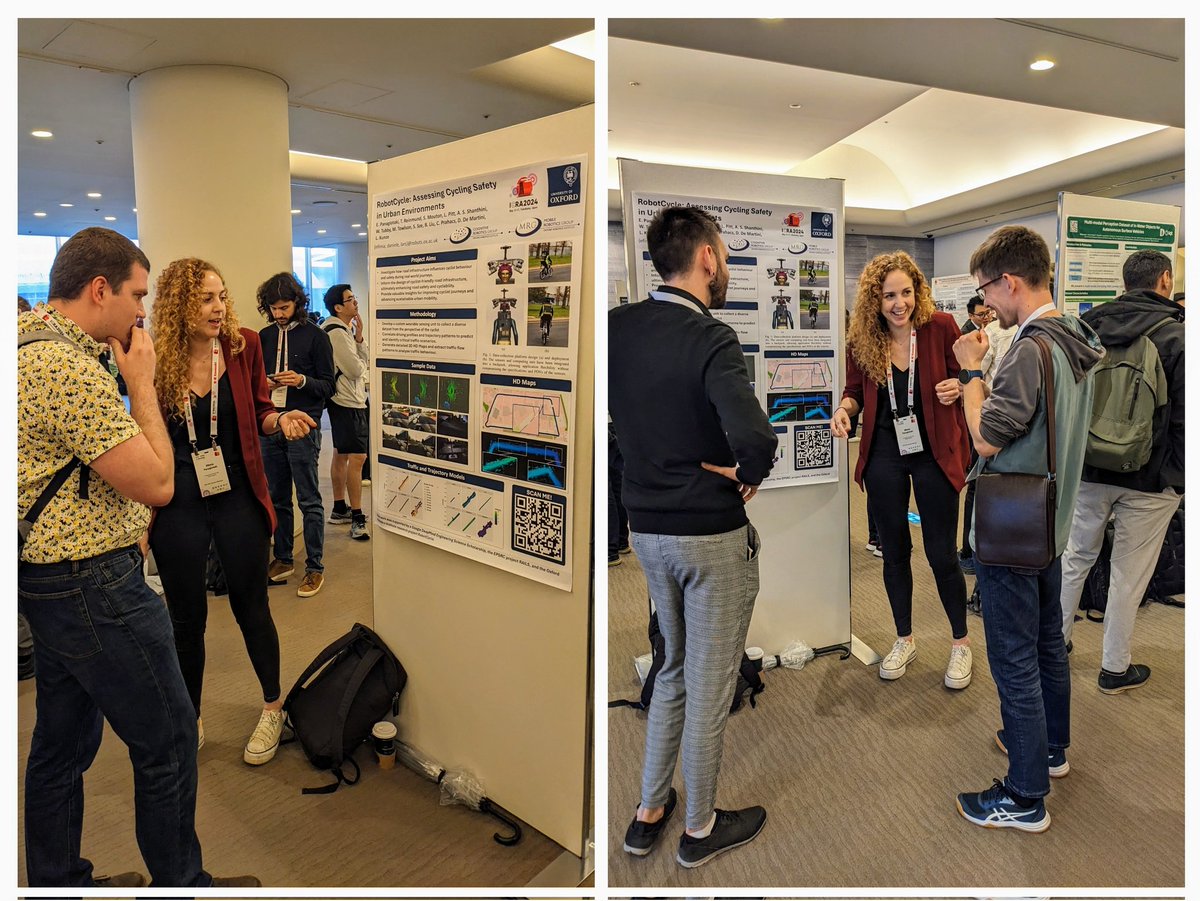
Today at #icra2024, @panefimia presented our work on #RobotCycle. A first step to map and understand the impact of infrastructure and road user behaviour on #RoadSafety and #CyclingSafety. It's fantastic to see what the team has designed and developed under her leadership 🎉💪🙏
Come and join us at #ICRA2024! Today, we have 2 works at the Field Robotics Workshop: @panefimia with "RobotCycle" and @mtt_gdd with "Watching Grass Grow". You can also find the papers on ArXiv at https://t.co/SfmhzQyg7G and https://t.co/qLhFwoNcq4
At #ICRA2024? @panefimia will be at the Fields Robotics workshop presenting a poster about RobotCycle: assessing the safety of Oxford cyclists using a novel sensing unit and traffic modelling approach.
Come say hi between 9am to 1pm tomorrow (13/5)! 👋
https://t.co/aEtOGIa5VO
Last week, the CRG celebrated our supervisor Lars Kunze @kula78 as he started a new position as a full professor with @BristolRobotLab.
Lars will continue leading the CRG as a visiting fellow, but please join us in celebrating his new role! 🎉 Congrats, Lars!