Started building robots. Everyone needs a hobby right!
Two actuators in this are small brushless motors with integrated drivers controlled via CAN. Wheels for now, but the idea is to step up to legs next.
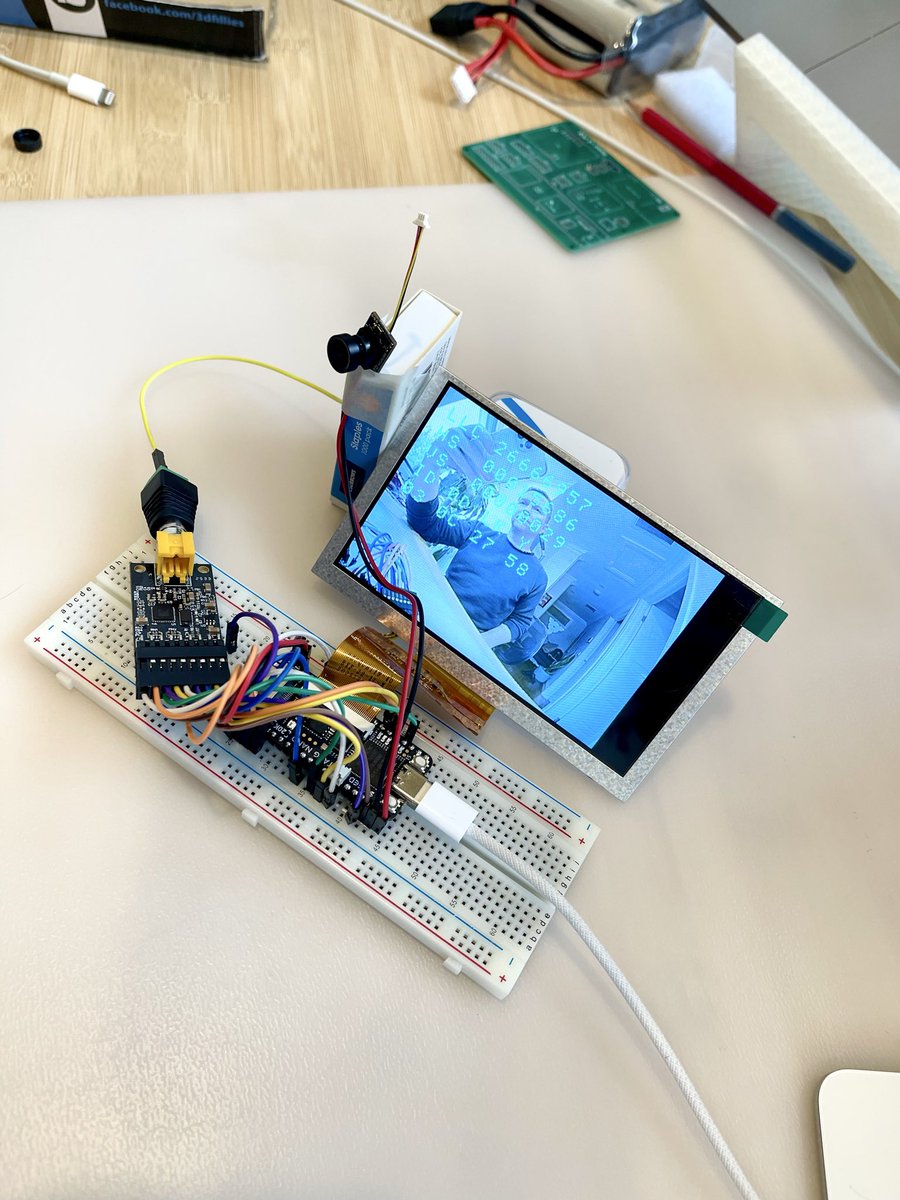
Developed an interest in those tiny FPV drones. The analog video stuff is interesting and felt approachable enough to hack a decoder+fpga+display to start doing some cool stuff. Feels very low latency, as it should be, also very retro. Details here https://t.co/WLCnVPaSEZ
@paulcjh_ What’s the size of the RB1?
It has everything I need, just may be a little large for what I want to cram it in to. Great board, and I really hope this goes well.
Thrilled to finally share what we've been working on for months at @huggingface 🤝@pollenrobotics
Our first robot: Reachy Mini
A dream come true: cute and low priced, hackable yet easy to use, powered by open-source and the infinite community.
Tiny price, small size, huge possibilities. A robot built to code, learn, share with AI builders of all ages, all around the globe, using the latest vision, speech and text AI model. A first robot for today's and tomorrow's AI builders.
Read more and order now at https://t.co/UpjRipw5tP
First deliveries expected right after the summer.
@chrismatthieu Odd and a bit annoying. I got lucky with a Parallels VM on an old Intel Mac I had sitting around. Officially you need Ubuntu running as the host OS for the SDK Manager to work.
@phethers I went and purchased a USB 3 cable because of the warning messages you get when starting up the realsense camera. Was getting 5fps, usb cable made no difference as it turned out the problem was streaming point cloud + images over wifi with ROS. Records to file at 60fps fine.
Those dropped IMU packets seemed to be due to a bad connection rather than a SW issue I spent hours debugging. New breadboard seems to have fixed it, also fixed the hum emanating from the OLED.
Wrote a MuJoCo simulation and control app for the so100/so-arm100 . Supports recording/playback and teleop'ing the sim. Needed something to keep me busy waiting for the parts to print out.
Details and code here -> https://t.co/LiR4VcHTmY
Thanks @LeRobotHF & @therobotstudio 🙌
@_Stocko_ It works, but I’ve still got a long way to go. Like ground planes for example. PCB is really just a neater version of my breadboard. Tempted to take the schematics for the CAN and IMU module and add them directly to the PCB, would be cheaper/better but more potential to not work.
@_Stocko_ I too have a dislike of MujocoEnv and gymnasium. Wanted to add an additional key binding to reset the sim, easy in Mujoco, but just buried in the MujocoEnv.
Anyway, it has been working for me. Not sure if this helps or confuses, but my current WIP is up https://t.co/uBdLui1CuJ
Of course this is what the first sim2real attempt looked like. After a days worth of trying everything I found the params (kp, ki) being used for the real motor speed control resulted in the wheel velocity being overshot.
Interestingly the RL policy doesn’t overreact on collisions like the PID/LQR balance controller does. It just runs into something, stops, and then pirouettes off. LQR left, policy right.
@_Stocko_ My next robot will have legs, so really interested to see how this goes.
I’m using velocity control and was seeing similar straight to max vel, robot flying off, no training improvement. Switched from a policy that gave absolute vel per time step , to a delta vel and it helped!