Introducing Project Glasswing: an urgent initiative to help secure the world’s most critical software.
It’s powered by our newest frontier model, Claude Mythos Preview, which can find software vulnerabilities better than all but the most skilled humans.
https://t.co/NQ7IfEtYk7
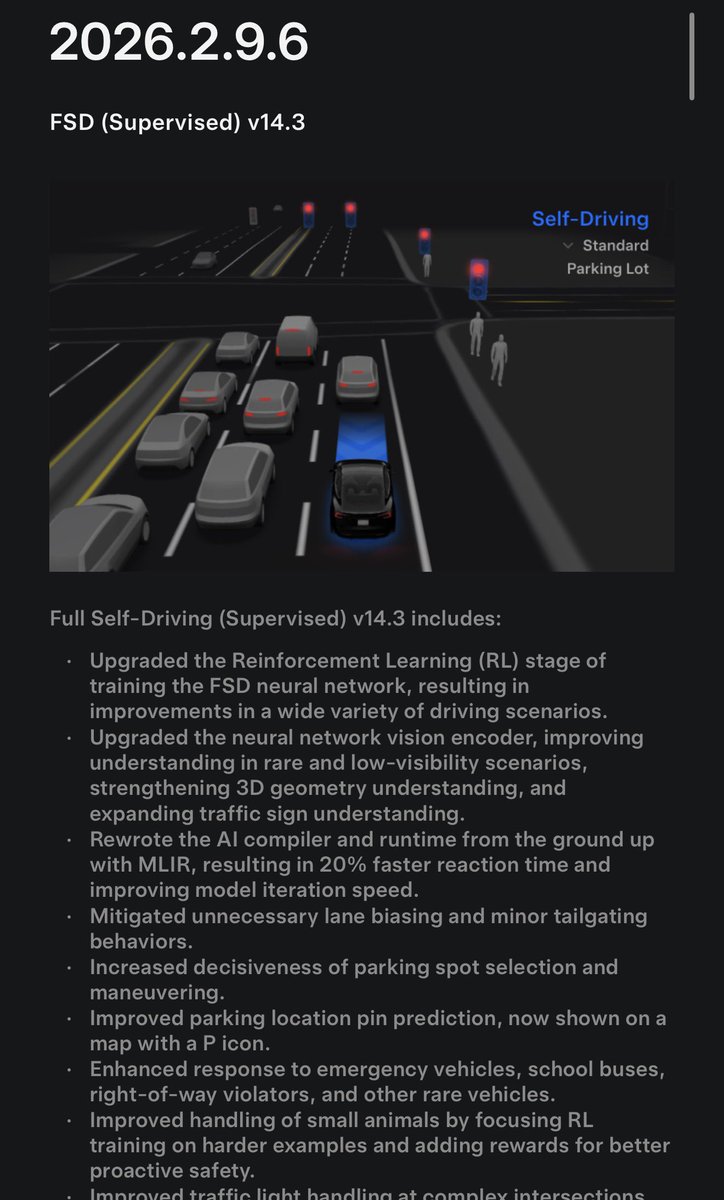
BREAKING: Tesla has officially released FSD V14.3
I'm downloading it in my Model Y right now. Here's everything that's new:
• Improved parking location pin prediction, now shown on a map with a P icon.
• Increased decisiveness of parking spot selection and maneuvering.
• Rewrote the Al compiler and runtime from the ground up with MLIR, resulting in 20% faster reaction time and improving model iteration speed.
• Enhanced response to emergency vehicles, school buses, right-of-way violators, and other rare vehicles.
• Mitigated unnecessary lane biasing and minor tailgating behaviors.
• Improved handling of small animals by focusing RL training on harder examples and adding rewards for better proactive safety.
• Improved traffic light handling at complex intersections with compound lights, curved roads, and yellow light stopping - driven by training on hard RL examples sourced from the Tesla fleet.
• Upgraded the Reinforcement Learning (RL) stage of training the FSD neural network, resulting in improvements in a wide variety of driving scenarios.
• Upgraded the neural network vision encoder, improving understanding in rare and low-visibility scenarios, strengthening 3D geometry understanding, and expanding traffic sign understanding.
• Improved handling for rare and unusual objects extending, hanging, or leaning into the vehicle path by sourcing infrequent events from the fleet.
• Improved handling of temporary system degradations by maintaining control and automatically recovering without driver intervention, reducing unnecessary disengagements.
Upcoming Improvements:
• Expand reasoning to all behaviors beyond destination handling.
• Add pothole avoidance.
• Improve driver monitoring system sensitivity with better eye gaze tracking, eye wear handling, and higher accuracy in variable lighting conditions.
Teslas now drive themselves from their birthplace at the factory to their designated loading dock lanes without human intervention
One step closer to large-scale unsupervised FSD
One of the most amazing FSD 13.x videos out there - extremely crowded NYC streets - FSD is a bit too hesitant with too many people https://t.co/bWEtvi0JT5
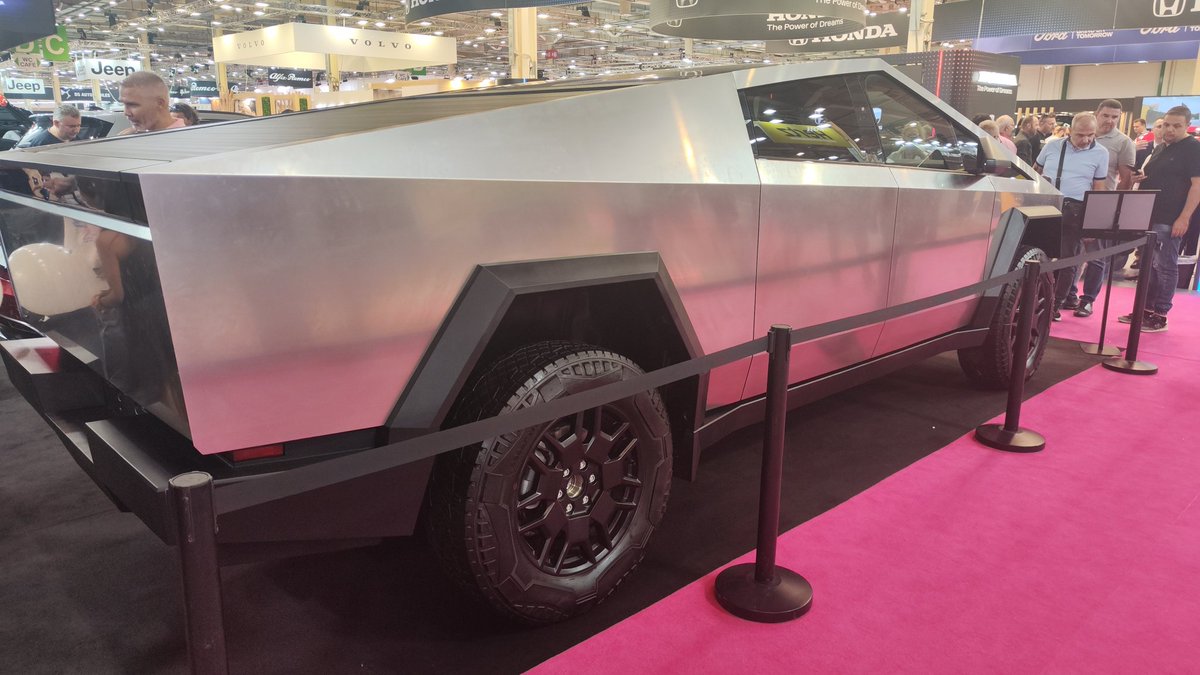
Tesla's Cybertruck is the only profitable EV pickup truck being made today, despite production starting less than a year ago.
• Hummer EV: In production for 3 years, still not profitable.
• Rivian R1T: In production for 3 years, still not profitable.
• Ford F-150 Lightning: In production for 2.5 years, still not profitable.
• Silverado EV: In production for 1 year, still not profitable.
Reflecting on the We, Robot event, we had:
- 19 Cybercabs and 29 Model Ys driving themselves
- 1,300 trips transporting over 2,000 guests
- Continuous operation of over the 3.5 hours
- And every trip was perfectly safe!
While we were busy making its walk more robust for 10/10, we’ve also been working on additional pieces of autonomy for Optimus!
The absence of (useful) GPS in most indoor environments makes visual navigation central for humanoids. Using its 2D cameras, Optimus can now navigate new places autonomously while avoiding obstacles, as it stores distinctive visual features in our cloud.
And it can do so while carrying significant payloads!
With this, Optimus can autonomously head to a charging station, dock itself (requires precise alignment) and charge as long as necessary.
Our work on Autopilot has greatly boosted these efforts; the same technology is used in both car & bot, barring some details and of course the dataset needed to train the bot’s AI.
Separately, we've also started tackling non-flat terrain and stairs.
Finally, Optimus started learning to interact with humans. We trained its neural net to hand over snacks & drinks upon gestures / voice requests.
All neural nets currently used by Optimus (manipulation tasks, visual obstacles detection, localization/navigation) run on its embedded computer directly, leveraging our AI accelerators.
Still a lot of work ahead, but exciting times!
NEWS: Anthony Levandowski, who co-founded Google's Waymo, says @Tesla has a huge advantage in data in the self-driving race.
"I'd rather be in Tesla's shoes than in Waymo's shoes; Tesla already has cars on the road, some of which use semi-autonomous features for tasks such as parking and lane-switching — and learning all the while. Musk has the greatest fleet to do this," he said.
"There's millions of Teslas out there that are constantly alerting, feeding back their data to Tesla to make the product better, and that's ultimately what's really going to be the differentiator here - that you have the richest, most consistent data to continuously improve over time," Levandowski said.
"I would say the Tesla has examples of maybe 10,000 or maybe a million times more data than Waymo does in terms of all other scenarios of driving," he added.
Source: https://t.co/2lfCHfdxur
We have put forward two especially important proposals for our Annual Meeting of Stockholders—and we need your vote.
Protect your rights as stockholders & protect the value of your investment by voting FOR the ratification of the 2018 CEO Performance Award & FOR Reincorporating Tesla in Texas.
Read more details here → https://t.co/WbcKtqU02U
@notch Oh those old times I was watching you coding Minicraft!! Well today I spent 6h and I made a 20+ hour @Spotify playlist with the music you had while coding. Hope your fans will feel the nostalgia and enjoy!! 🎶🎶🎶 https://t.co/zCaOEqaqP0
Remember in 2011, @notch creator of @Minecraft coding Minicraft at @ludumdare #22 and streaming at @Twitch ? Well I made a @Spotify playlist with the music he was playing while coding. Enjoy!! 🎶🎶🎶 https://t.co/daq5jtuoMz