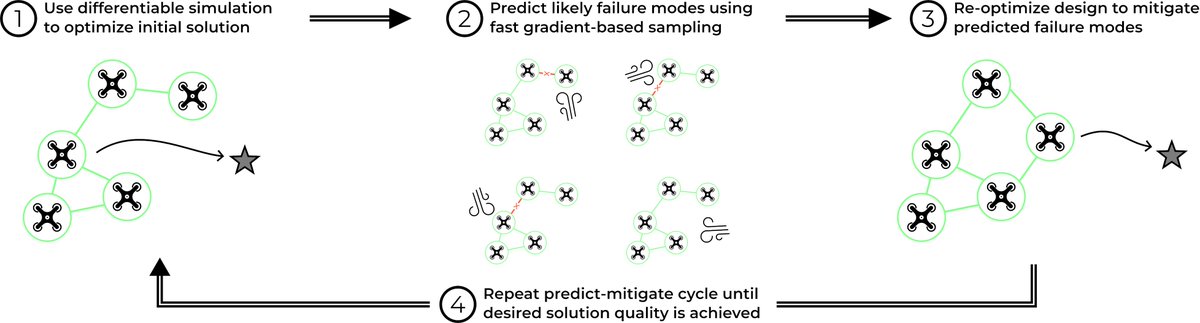
By predicting a diverse set of possible failures prior to deployment, we can make sure robots of all sizes (from drones to power grids) stay safe.
🧵 (6/7)
An @MITAeroAstro team developed a machine-learning technique that can autonomously fly a plane through a difficult “stabilize-avoid” scenario while avoiding obstacles.
Read more at MIT News https://t.co/9xouNpnWC0
Come to the poster sessions and oral presentations! Yue’s work will appear in Poster Session 1 while Songyuan’s will appear in Poster Session 2. Songyuan will provide a deeper introduction to his work on Friday at the “Oral Presentations 4” time slot. See you there! (2/2)
REALM has two strong works being presented at @l4dc_conf this year. @YueMengTHU 's “Hybrid Systems Neural Control with Region-of-Attraction Planner” and Songyuan Zhang’s “Compositional Neural Certificates for Networked Dynamical Systems” will be presented! To learn more... (1/2)
A huge number robotics problems can be modeled as hybrid dynamical systems, and these are known to be difficult to define controllers for. In @YueMengTHU ‘s new work (accepted to L4DC), we have developed a method for designing controllers for this important class of systems!
An exciting question that came from a vigorous discussion at REALM last week:
What differentiable simulators exist that can model soft robotic systems interacting withe the world?
(1/3)
#AcademicChatter#RoboticsChatter#DifferentiableSimulation
Context: REALM has established its passion for differentiable simulation in several different results (see our work on Architect) and we were having a spirited discussion last week about how better sensor placement/design might be possible if we had a good (2/3)