day 0: from zero to humanoid
after months of planning, i'm building what i believe will become the most comprehensive humanoid robotics platform ever created.
a full stack operating environment for humanoid robotics:
• knowledge graph & technical wiki
• ai powered troubleshooting
• end to end build systems
• skill & behavior marketplace
• multi agent engineering workflows
• 3d design and simulation tools
• finance, sourcing, and procurement layers
• from first principles to deployed humanoids
the goal is simple: make building humanoid robots radically more accessible, scalable, and programmable.
day 0 update: from zero to humanoid
started sketching the architecture today.
what started as a humanoid robotics platform is quickly turning into a collection of 8 major systems:
• humanoid wiki
• troubleshooting terminal
• build guides
• skill marketplace
• ai agent swarm
• 3d body designer
• agent finance layer
• robotics training data marketplace
the funny part is that each one could probably be its own company.
but the whole point is that they shouldn't be separate.
building a humanoid robot requires knowledge, design, simulation, troubleshooting, training, deployment, and capital.
all of it needs to live in one place.
still early. still just boxes and arrows.
but it's starting to look real.
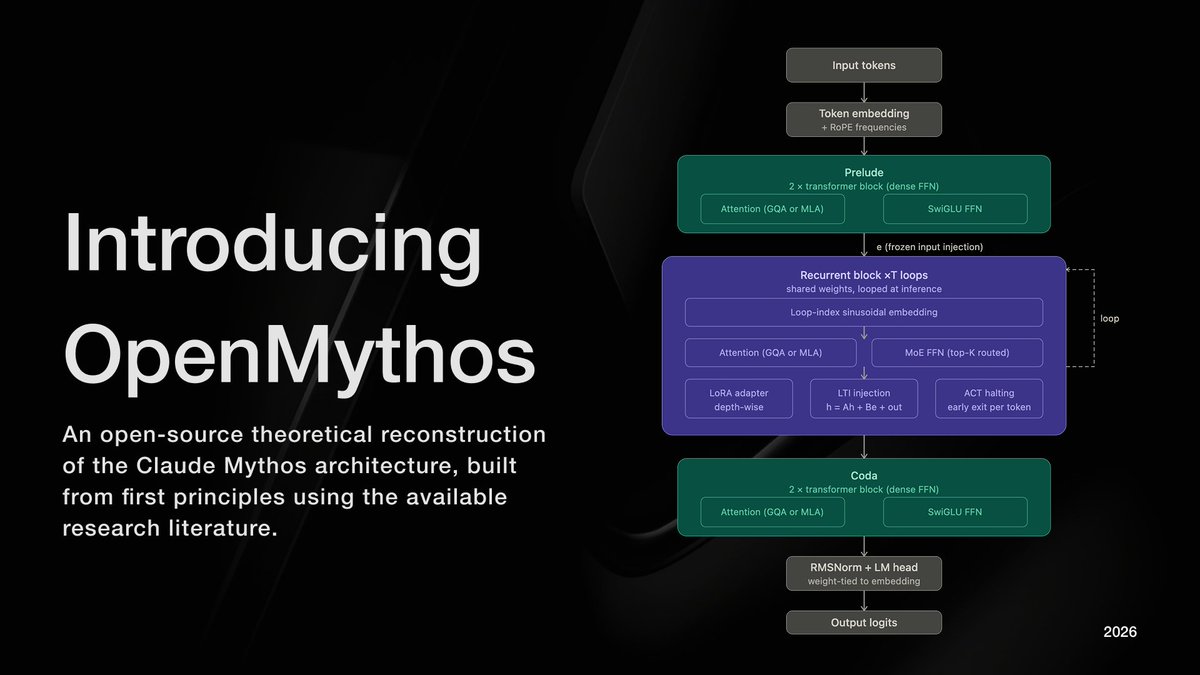
Introducing OpenMythos
An open-source, first-principles theoretical reconstruction of Claude Mythos, implemented in PyTorch.
The architecture instantiates a looped transformer with a Mixture-of-Experts (MoE) routing mechanism, enabling iterative depth via weight sharing and conditional computation across experts.
My implementation explores the hypothesis that recursive application of a fixed parameterized block, coupled with sparse expert activation, can yield improved efficiency–performance tradeoffs and emergent multi-step reasoning.
Learn more ⬇️🧵