🥳🥳 This is awesome! Please enjoy this 100x acceleration for bundle adjustment from PyPose v0.9.5! 🚀 🚀 🚀
📖 You may simply start from here: https://t.co/1nxzgenbZy
Excited to share our paper “Bundle Adjustment in the Eager Mode” is accepted to IEEE T-RO!
Notably, its GPU acceleration achieves over 100× speedup compared to C++ libraries such as GTSAM, g2o, and Ceres, on large-scale BA problems!
Code: https://t.co/gscV2DQzxP
🎉 Happy New Year 2026! 🚀
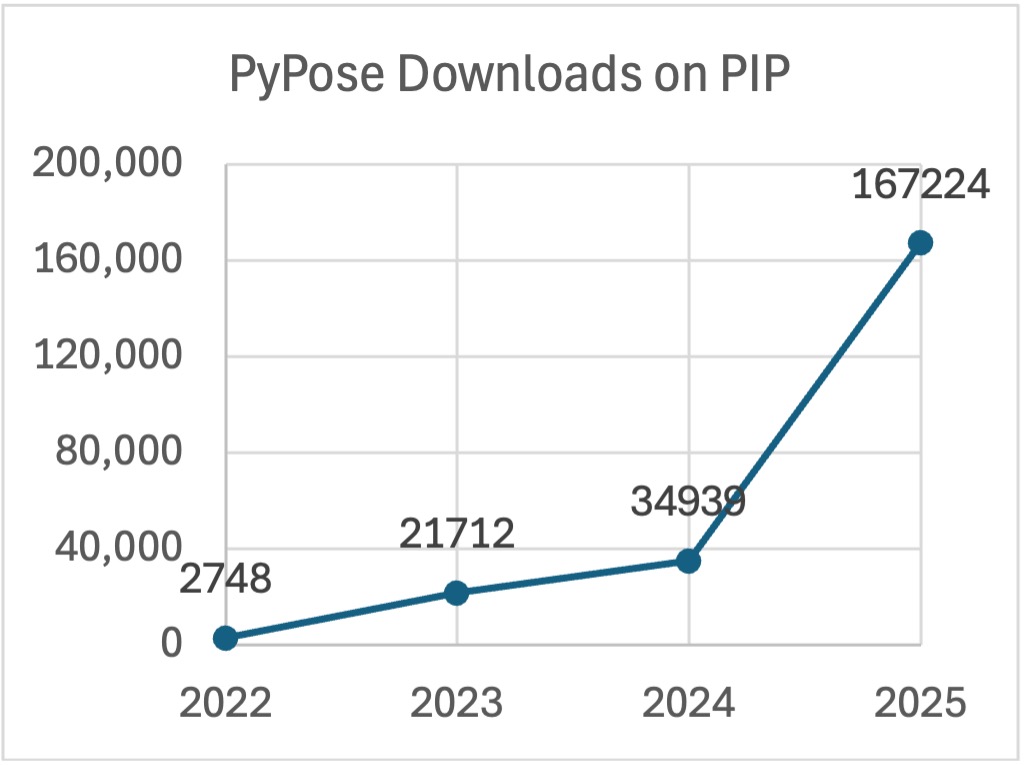
We’re excited to share that PyPose surpassed 160,000+ pip downloads in 2025 alone, representing over 60× growth since its creation in 2022. This indicates a strong and growing popularity trend.
Grateful for the support, and excited for what’s ahead! ✨
It has been my great pleasure to help make this happen. Looking forward to deepening insight and impact in 2026. Check out more photos and milestones at https://t.co/Bbm8dZUodT
🎉 Exciting News! 🎉 Thrilled to share that our latest V-SLAM system, AirSLAM, has been officially accepted to IEEE Transactions on Robotics (TRO)! 🚀 We’re proud to make this open-source for the community—feel free to download, experiment, and innovate! 🚀https://t.co/Y1G6z8Fl31
As we bid farewell to 2024 and enter 2025, we’re excited to share a summary of SAIR Lab’s key milestones from this past year: https://t.co/iP1CMDbHZr.
Looking ahead, our theme for 2025 is 👉 Transform 👈.
A heartfelt thank you to all our team members! 🎉
What is Neural-Symbolic AI? How do we use it for Robot Autonomy? How to overcome the generalization challenge of RL and Imitation Learning? In this article (https://t.co/kQpNZ1lec0), we introduce Imperative Learning, a Self-supervised Neural-Symbolic Framework as our answer.
🎉 Our work iSLAM: Imperative SLAM has been accepted to RA-L! ✨ iSLAM introduces a novel self-supervised imperative learning framework, promoting mutual correction between front-end and back-end components. 🔗 Learn more at https://t.co/HhtE565Wmb.
#SLAM#Robotics 🤖
We are organizing an IJRR Special Issue on "Foundation Models and Neural-Symbolic AI for Robotics". IJRR is one of the top robotics journals. Guest Editors include @DrChenWang, @jiajunwu_cs, @xf1280, @l_gionfrida, Anil Bharath, Alexander Gray. Details at https://t.co/wAzkMgkMvY
Are you ready for the next level tool of robot learning? PyPose now joins the PyTorch Ecosystem! It aims to bridge the gap between deep learning and robotics algorithms. Sounds cool, right? Try it `pip install pypose`, star it on GitHub https://t.co/1saHGbtzAP, and learn more from the Medium post:
Introducing PyPose, one of our latest ecosystem tools 🔥
PyPose is a PyTorch-based robotics-oriented library that provides a set of tools and algorithms for connecting deep learning with physics-based optimization.
Learn more 👇
https://t.co/LyYVr7j120
🚩Check out our latest breakthrough in Non-iterative SLAM! 👀 It's a novel visual SLAM method for warehouse robots with a single downward-facing camera leverages ground textures. 🤖 Watch our video presentation: https://t.co/wiEJpt0OlF. Explore the code at: https://t.co/PhgCQRU0ro 🖥️
#SLAM #Robotics #ComputerVision
🤖Don't miss this remarkable session at #ICCV23 Workshop on Robot Learning and SLAM! 🌟@michaelkaess from @CarnegieMellon presents "Learning for Sonar and Radar SLAM." 🚀 Watch the video presentation at https://t.co/KMOM4TB5RP and dive into the slides at https://t.co/1jSIv830iQ. 🔍#Robotics #SLAM #ICCV23
🤖Thrilled to announce @_ayoungk from @SeoulNatlUni as a speaker at #ICCV23 Workshop on Robot Learning and SLAM! 🌟Join the conversation on "Advancing SLAM with Learning: Integrating High-Level Scene Understanding with Non-conventional Sensors." 🚀 Watch the video presentation at https://t.co/SVuNTpFFeR and explore the slides at https://t.co/1jSIv830iQ. 🔍#Robotics #SLAM #ICCV23
🤖Join us for an exciting session at #ICCV23 Workshop on Robot Learning and SLAM! 🌟@l_gionfrida from @KingsCollegeLon presents "Advancing the Role of SLAM-Based Active Mapping in Wearable Robotics." 🚀 Watch the video presentation at https://t.co/DfVXNn3U9x and dive into the slides at https://t.co/1jSIv830iQ. 🔍 #Robotics #SLAM #ICCV23
🤖Exciting time at #ICCV23 Workshop on Robot Learning and SLAM: 🌟 @shubhtuls from @CarnegieMellon presents "Probabilistic Pose Prediction." 🚀 Watch the video presentation at https://t.co/ZypqqVBeab and explore the slides at https://t.co/1jSIv830iQ. Don't miss this great talk! 🔍#Robotics #SLAM #ICCV23
🤖Exciting news! Tim Barfoot from @UofT is a featured speaker at #ICCV23 Workshop on Robot Learning and SLAM. 🌟Join him as he discusses "Learning Perception Components for Long-Term Path Following." 🚀Watch the video presentation at https://t.co/lkMGZRR5Hq and dive into the slides at https://t.co/1jSIv830iQ. 🔍#Robotics #SLAM #ICCV23
🤖 Get ready for an enlightening session at #ICCV23 Workshop on Robot Learning and SLAM! 🌟 Daniel Cremers from @TU_Muenchen presents "From Monocular SLAM to 3D Dynamic Scene Understanding." 🚀 Watch the video presentation at https://t.co/OaOUDaUgWN and explore the slides at https://t.co/1jSIv830iQ. 🔍#Robotics #SLAM #ICCV23
🤖 Prof. @AjdDavison from @imperialcollege is a featured speaker at #ICCV23 Workshop on Robot Learning and SLAM. 🌟 Join him as he delves into "Distributed Estimation and Learning for Robotics." 🚀 Watch his video presentation at https://t.co/rm2hDiPrV2 and explore the slides at https://t.co/1jSIv830iQ. 🔍 #Robotics #SLAM #ICCV23
🌟 Our lab leader @DrChenWang presented "Imperative SLAM and PyPose Library for Robot Learning" at #ICCV23 Workshop! 🚀 See the video https://t.co/1PzBx9hQPb and slides https://t.co/1jSIv830iQ. 🔍 Also, find more at https://t.co/L1AvbirM7x and https://t.co/J5N8BTry3a. 🚩 Don't hesitate to explore the future of robotics! 🤖 #Robotics #SLAM #ICCV23 #ImperativeLearning