Applications are open for the MATS Autumn 2026 cohort (Sep 28 - Dec 4). If you’re interested in working with me on scheming propensity evaluations, apply to MATS by June 7 EOD AoE! https://t.co/HWvjvqLwj7
I will be mentoring as part of the @GoogleDeepMind stream with @MaryPhuong10@davlindner and @zimmerrol - read more about some project directions we are interested in, mentorship style, and the kind of fellows we are looking for: https://t.co/YKSg4n1YAb
cool new release: a tiny open video VLM that understands what happens in videos and when 👀
Marlin-2B (Apache 2.0!) can caption clips into timestamped events, or find a natural-language moment inside the video (can see a ton of cool use cases with it)
Made a Hugging Face demo for it ⬇️
MolmoAct2 kinda just works out of the box in an unseen environment and with unseen objects.
I find it really crazy that I can just download a model from the internet and plug it into my robot and it can do some tasks at a limited capacity right away.
this video is at 2x speed
We have seen some impressive robot manipulation policies recently. This is great, but for these results to be convincing (and practical) we should insist on generalization across 1. Object location (within some range) 2. Different instances of an object category 3. Background clutter. Authors should present experiments which demonstrate the range of variation which can be handled. Far too often the policy doesn't even generalize across all instances of an object category! Legged locomotion policies were convincing only when they worked across different terrain as in https://t.co/APzhehXfPT We need to do the same for manipulanda.
We finally know why LLMs hallucinate. It's not the model. It's the geometry.
@OpenAI text-embedding-3-large: 91/3072 dimensions do real work.
@GeminiApp gemini-embedding-001: 80/3072 dimensions do real work.
~97% of your vector database is mathematically empty. Your RAG system is retrieving from noise.
@ashwingop and I present "The Geometry of Consolidation" - a proof that RAG compression has a hard floor no algorithm can beat, set by a single spectral number your embedding model cannot escape.
Every hallucination your RAG pipeline produces? This is why.
Paper + results: https://t.co/zut8pdoPbH
I built and trained a ~6M parameter GPT-2 entirely from scratch in C++, and it actually generates English text with mostly correct grammar!
No PyTorch and no external dependencies. Just pure C++ 20.
More info, GitHub link, and screenshots below!
We’re building out our embedded engineering team to develop the next generation of data collection hardware for robotics.
Multiple roles- all based in Delhi NCR. 25-30 LPA CTC.
If you can debug something you cannot see, please apply. Link in comments. Rt for good karma 🙏
Been experimenting with procedural locomotion on #GaussianSplat environments from @theworldlabs .
Built a little multi-legged robot in Unity that raycasts against the splat data to figure out where to place its feet, no meshes or colliders involved... Pretty fun to climb surfaces, walk on walls, and set a weird number of legs on the fly :)
Still rough around the edges but pretty fun to watch it figure things out.
#GaussianSplatting #Unity3D #WorldLabs #ProceduralAnimation
Today, we publicly released RoboCasa365, a large-scale simulation benchmark for training and systematically evaluating generalist robot models. Built upon our original RoboCasa framework, it offers:
• 2,500 realistic kitchen environments;
• 365 everyday tasks (basic skills + long-horizon mobile manipulation);
• Over 3,200 objects with many articulated fixtures/appliances.
All are designed for fully controlled, reproducible benchmarking of robotic policies.
Progress in robotic foundation models is real. But it’s still hard to answer basic questions like: How close are we to general-purpose autonomy? What factors drive generalization? What are the model/data scaling curves like? Real-world eval is slow and noisy, and existing sims (like LIBERO, which we built 3 years ago) often lack sufficient task and scene diversity.
This benchmark comes with 2,200+ hours of demonstrations and 500K+ trajectories to support studies of multi-task training, pretraining, and continual learning at scale.
Check it out at https://t.co/0EV3tPmTVy
Say you have trained your deep learning model. It works. But do you know what it has actually learned?
🚀 We’ve built SymTorch: a library that translates deep learning models into human-readable equations.
I've attached here a quick video demonstrating how SymTorch works.
@Microsoft Research India Fellowships
Exposure 1 to 2 years on different skills
Candidates should have completed BS/BE/BTech or MS/ME/MTech in Computer Science or related areas, graduating by summer 2026.
Details at https://t.co/RKc8xQpRcb
Apply by 15th February 2026
Small Grants Programme for World Day for Assistive Technology (AT) Celebration in Asia by @UNOPS
Grant size USD 15,000
The initiative directly supports SDG 3, 4, 10 ensuring global policy coherence and impact.
https://t.co/NBxjN9rgH2
Apply by 16th February 2026
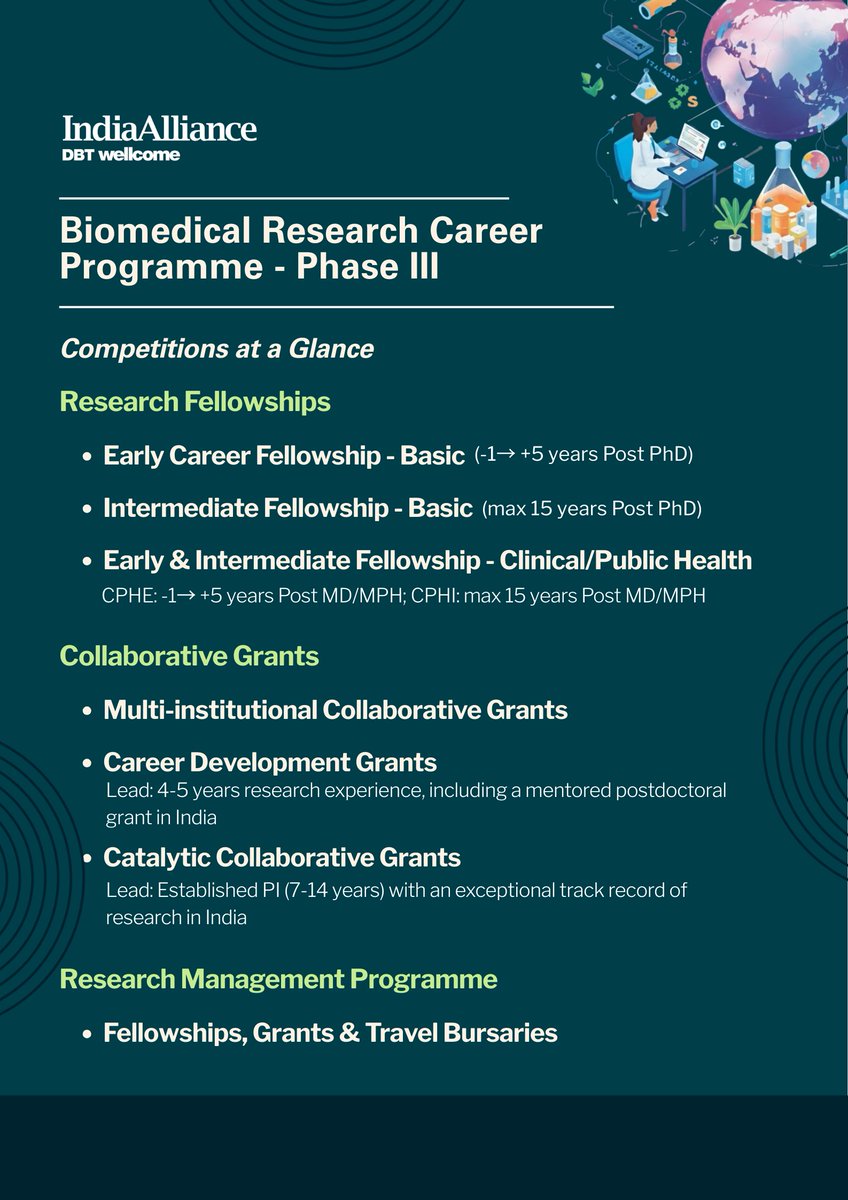
DBT Wellcome Trust India Alliance Research Fellowships
in Basic Biomedical Sciences, Clinical/ Public Health, Research Management
Early Career Fellowships
Intermediate Fellowships
Details at https://t.co/eTAdq2Zm6w
Apply by dates given in the pictures.
SHOCKING ‼️
Delhi | A patient from Madhya Pradesh died within 24 hours of admission at BLK Max Hospital. After ₹2 lakh was paid, the family alleged an additional ₹1 lakh demand and claimed the hospital withheld the body.
NHRC member Priyank Kanoongo had to intervene. It is Shamefull that he along with Officials and Police had to reach the Hospital to secure the handover after much warnings.
Just a few months after releasing Scoot, which we feel redefined motion generation quality, our team has made substantial improvements in speed, quality, subtlety, and instruction following.
This comes in concert with our newly scaled data collection and labeling efforts, compute increase, substantial architectural improvements, and more stable / scalable training dynamics.
Swing is our new flagship movement model. It's live today in Cartwheel studio with infinite batch generation coming soon to our API.
Treating Movement as a fundamentally new data type has really unlocked our ability to rapidly make improvements. As it turns out there are far more use cases than you might imagine from entertainment to robotics.