In one month we are hosting students from the ATHENS university network, and submerge them in an intensive short-duration course, to become soft robotic experts in one week. To kickstart their soft robotic journey, we send them a DIY soft robotic package at home! Exciting times!
IEEE RoboSoft 2025 call for papers and workshops!
Deadlines (all 9am PST)
- Paper: Oct 15
- Ext. Abstract: Jan 15
- 2025 Rising stars oral spotlight: Jan 15
- Workshop: Nov 1
Paper transfers possible from journals: RA-L, T-MRB, T-RO and RA-M
More info: https://t.co/m6gdeAD1Zv
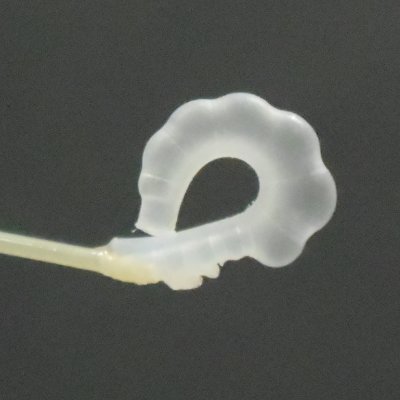
#NewPaper We developed a fully soft small intestinal simulator, where peristalsis is instigated via radially contracting soft actuators, to be used in surgical training.
paper: https://t.co/ePleCJbJEv
With support of @FWOVlaanderen and @ERC_Research
Through my @ERC_Research starting grant (ILUMIS), the @robotics_soft group is looking for a PhD student to transform the field of soft robotics by harnessing nonlinearities in a fluidic network. Interested? apply here: https://t.co/P6c4bvx5KL
#NewPaper@robotics_soft
In this paper we solve the inverse problem in soft robots: where to place patch constraints on a balloon to reach a certain goal deformation. In collaboration with @TheFaboratory@hseas@KU_Leuven
Read more! 📖 https://t.co/CpPLhhr1Pw
#NewPaper
I took us a long time to find the right metrics to benchmark artificial cilia against their natural counterparts. Main conclusion: we are not there yet! (but in some aspects we are getting close) Thanks to @SamPeerlinck @edomil @robotics_soft
https://t.co/30EedMdKpx
Just a few more days until we close the job openings for 2 PhD students in the field of soft robotics @robotics_soft@KU_Leuven!
https://t.co/rrmokhwKgK
https://t.co/oAFUcMmtA7
Within the Athens program, 22 students became soft robotic experts, mastering manufacturing, control, design and cutting tethers. And this only in one week. Very thankful for the experts that came @KU_Leuven and shared their vision: @CosimoDella, @edomil, @_DavidMelancon_
In the framework of my @ERC_Research starting grant (ILUMIS), I am looking for 2 PhDs. Both will be transforming the field of soft robotics by harnessing nonlinearities in a fluidic network, one focusing on interconnections, the other on fluids.
Interested? See links bellow
Did you know that soft robots make excellent xmas tree decorations? The soft robotics research group of @KU_Leuven wishes you all a merry everything and a happy always.
Very excited and grateful that I was awarded an ERC starting grant with project ILUMIS on Interactive Fluidic State Machines for Soft Robotics. The next 5 years are going to be interesting @KU_Leuven in my group @robotics_soft !!
#ERCStG
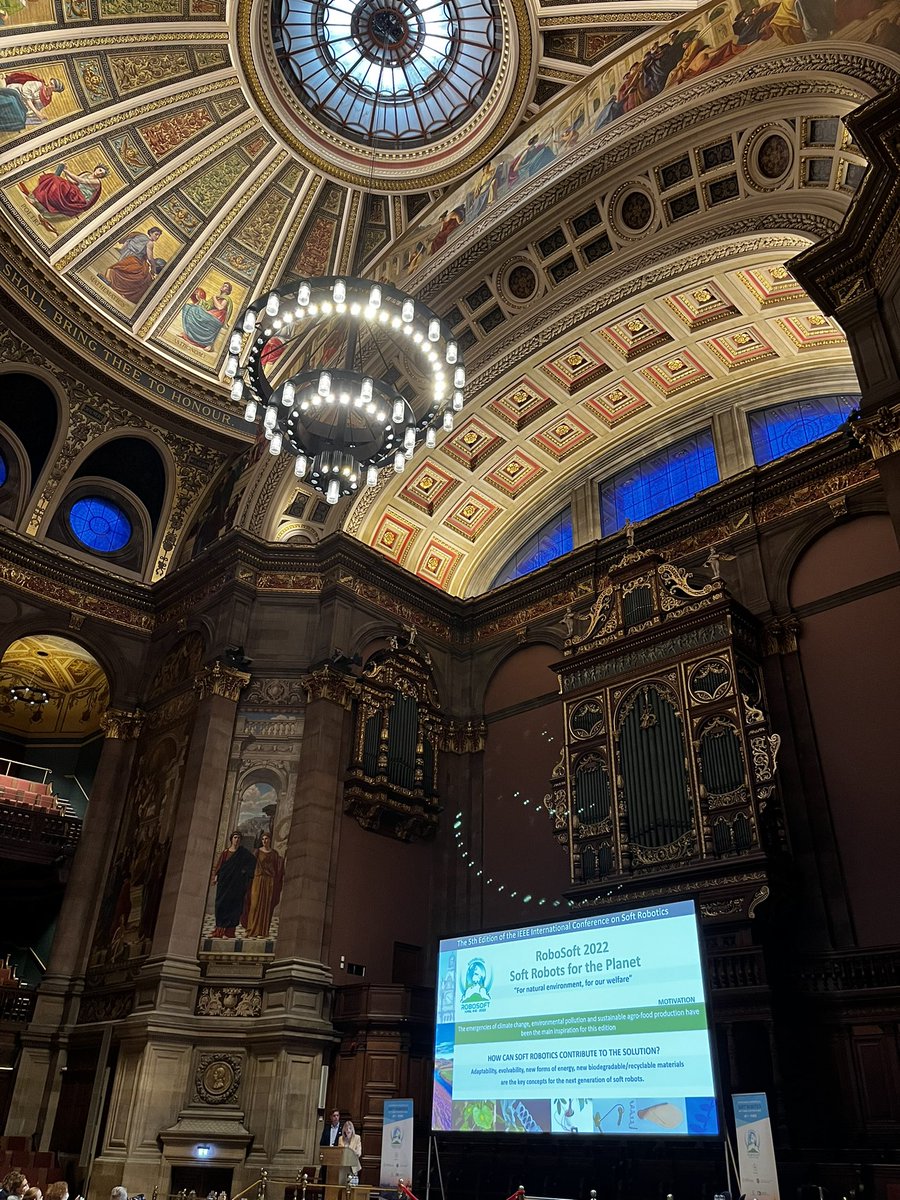
Throwback to last week’s @robosoft22 conference. We had an absolutely amazing time with @BenjaminGoriss1 @edomil, Bert Van Raemdonck and David Mélançon. #robosoft22
New paper out in today discussing the concept of embodied energy in robotics. We're hoping this perspective piece stirs up meaningful discussion and leads to a paradigm shift in how we design robots for autonomy. https://t.co/5GWLODQvoZ
@edomil @Nature
New Research: Morphological Control of Cilia-Inspired Asymmetric Movements Using Nonlinear Soft Inflatable Actuators: Soft robotic systems typically follow conventional control schemes, where actuators are supplied with dedicated inputs… https://t.co/UesZrs1jEZ #Robotics#AI
“Model-based control can improve the performance of artificial cilia”. Don’t miss the poster session later today at 4:30pm (Eastern Time) at #robosoft2021 ! @CosimoDella @edomil
We built an array of artificial cilia that mimics the individual and collective nonreciprocal motions of biological cilia using miniaturized soft inflatable actuators.