Deep Spatial Perception:
Localization & Reconstruction.
PhD thesis of @serizba
tl;dr: mostly papers combined, but they are good (e.g. DINO-SALAD) and look at the gorgeous title page!
https://t.co/qD7EdQe8pB
One concern that I have as an AI researcher when publishing code is that it can potentially be used in dual-use applications.
To solve this, we propose Civil Software Licenses. They prevent dual-use while being minimal in the restrictions they impose:
https://t.co/gikJHAAMkd
This week at #CVPR2025, Niantic Spatial is sharing the major strides made toward building a Large Geospatial Model that merges the digital and physical worlds. 🌍🧠
📐MVSAnywhere: Zero-Shot Multi-View Stereo
🎨 Morpheus: Generative 3D Scene Stylization
These two research projects reflect a larger ambition: to make AI systems that are spatially aware – able to perceive, interpret, and understand the physical world.
🔗See full blog and GitHub links:
Blog post: https://t.co/JrQBkd9AYl
MVS Anywhere GitHub: https://t.co/mAiuLvciPj
Morpheus GitHub: https://t.co/ulBZMB9tRF
#CVPR2025 #GeospatialAI #NianticSpatial #ComputerVision #3DMapping #AR #GaussianSplatting #DiffusionModels
Presenting today at #CVPR poster 81.
Code is available at https://t.co/c8uNbU2L5C
Want to try it on an iPhone video? On Android? On any other sequence you have? We got you covered. Check the repo.
🔍Looking for a multi-view depth method that just works?
We're excited to share MVSAnywhere, which we will present at #CVPR2025. MVSAnywhere produces sharp depths, generalizes and is robust to all kind of scenes, and it's scale agnostic.
More info:
https://t.co/esbaLbsRF4
Behind every great conference is a team of dedicated reviewers. Congratulations to this year’s #CVPR2025 Outstanding Reviewers!
https://t.co/z8w4YJKTep
🔍Looking for a multi-view depth method that just works?
We're excited to share MVSAnywhere, which we will present at #CVPR2025. MVSAnywhere produces sharp depths, generalizes and is robust to all kind of scenes, and it's scale agnostic.
More info:
https://t.co/esbaLbsRF4
💡Use case:
We show how the accurate and robust depths from MVSAnywhere serve to regularize gaussian splats, obtaining much cleaner scene reconstructions.
As MVSAnywhere is agnostic to the scene scale, this is plug-and-play for your splats!
Just today, I evaluated our #ECCV2024 work in an additional downstream task as a table cloth. It performed similarly to commercial baselines without task-specific fine tuning 🤭🤭🤣🤣
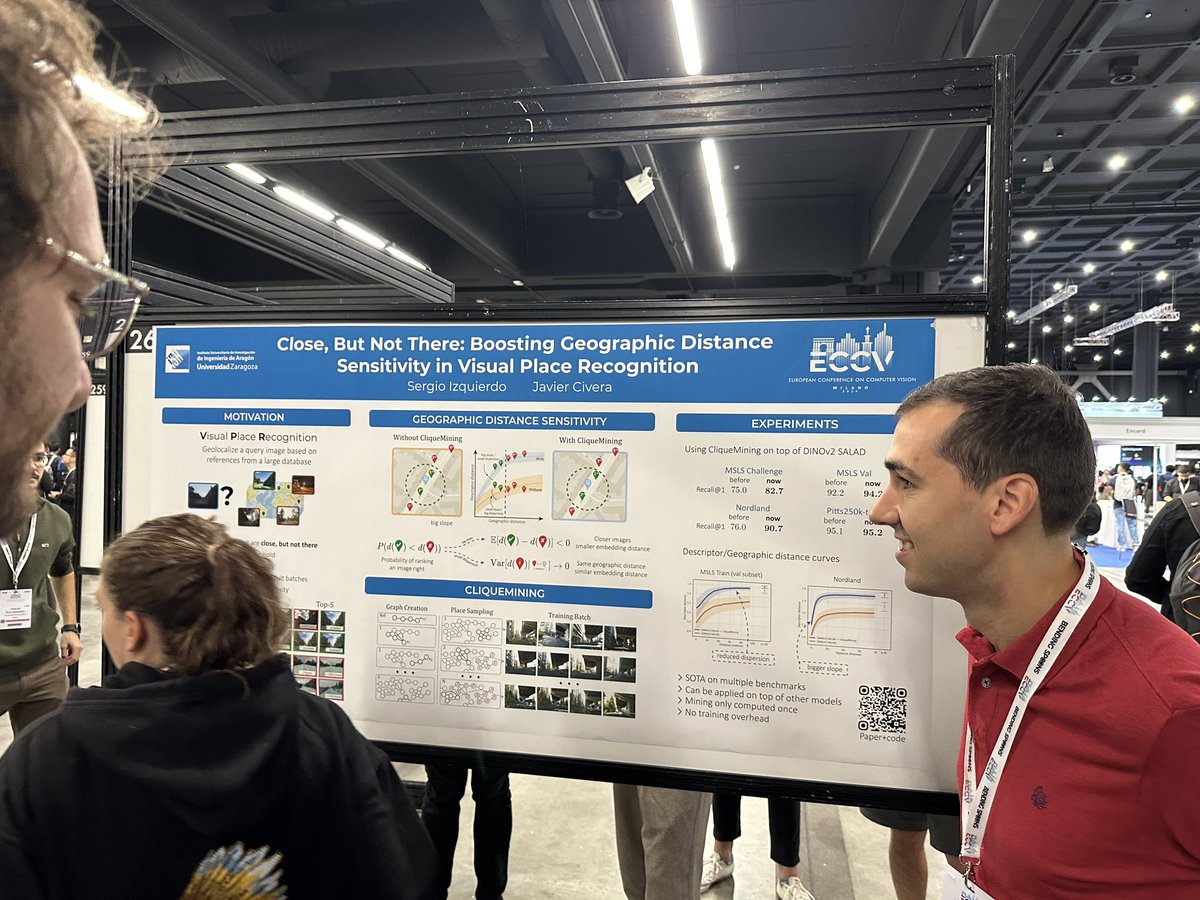
Do you want to boost the performance of your Visual Place Recognition model? Check our poster 260 at #ECCV2024 and discover how an effective mining strategy can boost it's sensitivity. With @jcivera
🚀 Excited to release OpenVPRLab! 🎉
An open-source framework for Visual Place Recognition (VPR), featuring extensible, modular, and scalable components, enabling researchers to train/develop deep VPR models with reproducible SOTA performance.
🔗https://t.co/2pWkiGwzIq
🧵👇
Just accepted to #ECCV2024
We analyse and describe the Geographic Distance Sensitivity and propose a mining strategy to boost it, greatly improving performance on Visual Place Recognition.
Close, But Not There: Boosting Geographic Distance Sensitivity in Visual Place Recognition
@serizba, @jcivera
tl;dr: analyze Geographic Distance Sensitivity (GDS) of VPR embeddings; training samples->graph->extract cliques->geographically close images
https://t.co/ppwoRMQXaL
We propose a novel mining strategy, CliqueMining, which creates very difficult batches of very similar images. This boost the Geographic Distance Sensitivity of the models, increasing recalls by a very big margin. With @jcivera.
Check the paper:
https://t.co/9mpuMqyQd7
Some recent works on VPR work very well. However, in our just accepted #ECCV2024 paper we identified a common failure case where retrieved images are close, but above the positive threshold.
In our paper, "Close, But Not There: Boosting Geographic Distance Sensitivity in Visual Place Recognition", we analysed how some models fail to correctly rank relatively close frames. This drastically lowers the obtained recalls.