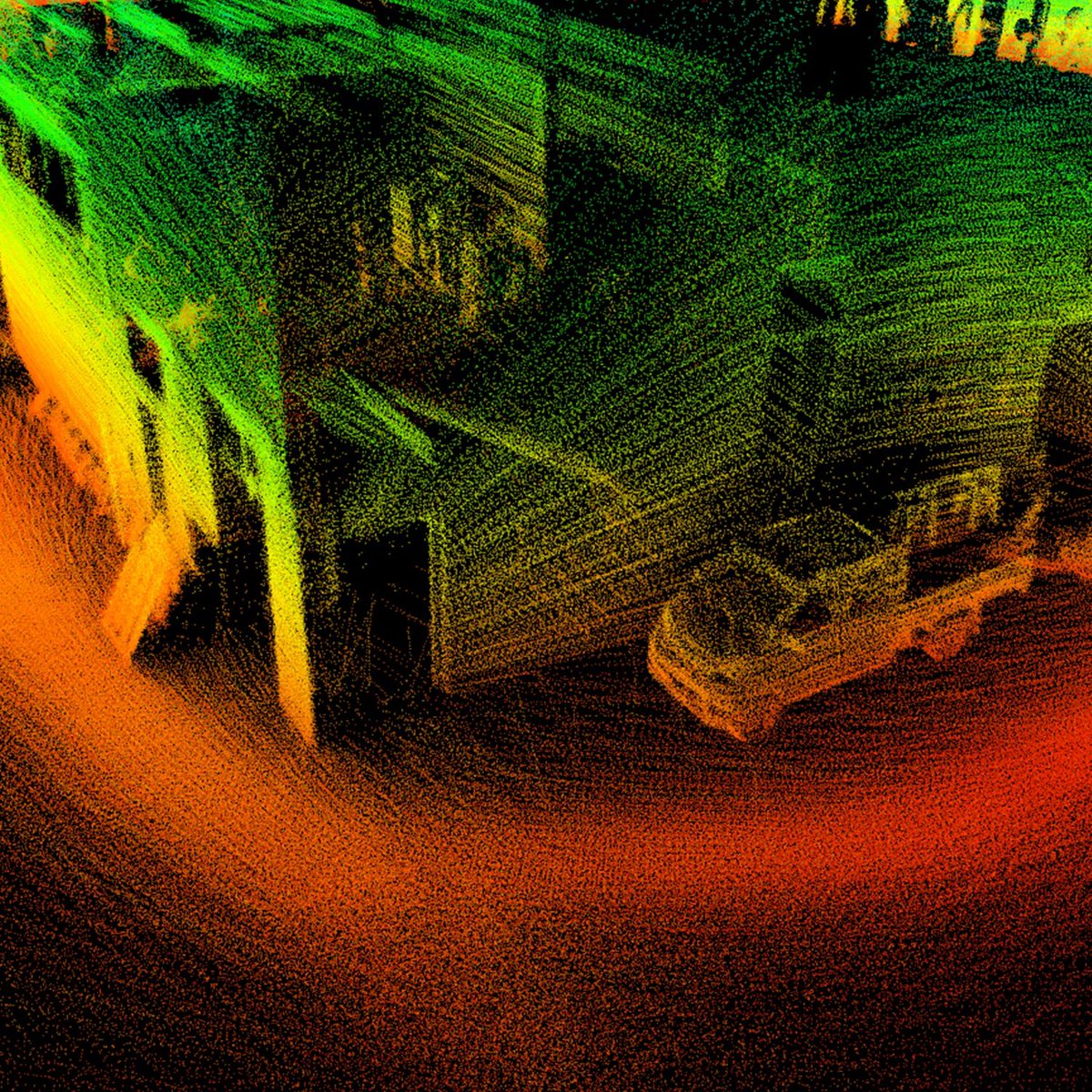
First point cloud of @SHOW_ROBOTICS test area from the Intel RealSense depth sensor. Pretty solid already for visual odometry. Next step: adding a 360° LiDAR, so we can fuse it in and get very precise time-of-flight odometry for mapping.
We’re entering a new phase of the project.
The platform is getting ready for deployment.
We’ve finalized @showrobotics test area, added live A/V displays for system status and navigation visualizations, completed floor markings and the outdoor access ramp, brought the control room online, finished wiring the rig, and installed fire alarms and extinguishers across the facility.
Next step: an autonomous docking station for continuous charging.
Why this matters:
The embodied agent will soon start roaming freely across the entire facility, indoors and outdoors, operating continuously. This marks the beginning of our first real experiments in continual learning.
We’re deliberately starting with a very simple, open exploration policy. No strong rewards. No predefined objectives. Just minimal nudges and maximum autonomy. Our hypothesis is that, over time, this setup will lead to emergent behaviors and allow the agent’s character to evolve through sustained interaction with the real world, rather than task optimization.
Learning, here, is not episodic. It’s continuous, grounded, and unconstrained in time.
Over the past few days, we’ve been running a series of experiments across hardware, perception, and cognition layers:
- Integrated a main battery disconnect and replaced driver fuses with resettable breakers, improving fault isolation and rapid maintenance.
- Finalized auto-tracking (“follow me”) behavior, now extended with speech commands using voice direction-of-arrival (DOA) for spatial interaction.
- Validated Dynamixel servo identification, closed-loop calibration, and inverse kinematics on a 3D-printed manipulator prototype.
- Designed and prototyped a protective bumper for the depth-sensing stack.
- Evaluated LiDAR architectures and identified the Unitree 4D LiDAR L2 as a strong candidate for dense, dynamic perception.
- Initiated a design language exploration focused on machines as machines, functional, legible, and expressive through structure.
- Began deeper discussions on continuous and in-context learning, examining reward structures, goal formation, emergence, and ethical boundaries.
Update #16 from @SHOW_ROBOTICS workshop
All four suspensions are now installed on the new frame. Drilling the holes for the shock absorber axles in the frame was challenging, as the drill press tended to drift due to the intricate shape of the aluminium profile. I made a hard steel template, which worked well, but the steel was only durable enough to act as a guide once. To maintain precision, I had to make a new template for each pair of holes.
For now, the large bolts are only acting as guides. Tomorrow, I’ll add four brass inserts to each 3D-printed upper block and secure each suspension to the frame with four machine screws.
Update #8 from the @SHOW_ROBOTICS workshop
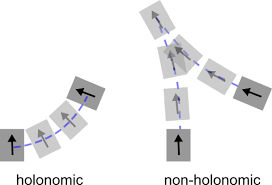
We learned a lot this week testing the robotic platform. First: mecanum wheels are fun. They really live up to the promise of holonomic motion, and to my surprise they handled off-road terrain way better than expected. But as always, new tests mean new ideas for improvements. So… back to the build.
• Suspensions
Vibrations were shaking the chassis and making some electronics wobble, so we’re adding proper damping. We ordered everything for a simple suspension system using JIS SIML mould springs (the blue, light-load ones). Each suspension will use an M8 bolt running through a 3D-printed nylon core, sandwiched between 30 mm aluminium T-rails. This should reduce resonance and that occasional brutal rolling sound.
• Depth vision
Next step is depth perception. I’ll mount the Intel RealSense D455F on a small mast. It has an active laser IR projector, dual IR-filtered cameras, an RGB camera, and an onboard IMU. That gives us depth maps, point clouds, and orientation data, super useful for navigation and mapping.
• Actuators
New motors just arrived: Dynamixel X-series servos from Robotis. I’ll set up a clean power delivery testbench and start validating torque, speed, and thermal behavior. Once that’s done, Sam will plug them into the control stack.
The ramps are validated too, although the main one was rushed, so I’ll eventually rebuild, level, and paint it. Still, it works, and that’s what matters for now.
Loving this “build in public” flow. Thanks for following the journey, more upgrades coming soon.
TRUMP ADMINISTRATION SHIFTS FOCUS TO ROBOTICS
Politico reports that after its AI push, the Trump administration is now turning attention to robotics. Commerce Secretary Howard Lutnick has been meeting with robotics CEOs and is “all in” on accelerating the sector’s development, according to sources.
Now that Vita is driving, it’s time to upgrade her vision with infrared laser eyes so she can scan and map the world. Coming next week 👁️
Loving this step deeper into robotics with Nvidia Jetson, Intel RealSense, ROS, RS485 bus, BLDC motors and mecanum wheels.
And if you’re wondering if the wheels are too big for Vita… don’t worry, she will be on growth hormones really soon haha
Projects to watch in the $VIRTUAL ecosystem P4
Project: Show Robotics | VitaNovaShow
Type: Embodied AI and Robotics
Outlook: Mid-to-Long Term
AI and Robotics is a core narrative in the @virtuals_io ecosystem. The team at SHOW Robotics are building at the intersection of entertainment, AI, and Robotics.
Show Robotics is an open lab building expressive robots and AI characters in public. Building for 8+ months, they are building at the crossroads of physical robots, ai, web3, and entertainment.
They are pioneers in the IP Robotics space with huge potential for growth. Think about your favourite robot characters: Wall-E, R2-D2, The Iron Giant, and Bender, this team is bringing that entertainment vision to life.
Vita is their first product and is "a first-of-its-kind IP agent, an expressive AI personality uniquely enabled by its robotic embodiment to explore, observe, and learn from the physical world and engage with the people who cross its path."
Once ready, Vita will be livestreaming it's adventures (Twitch and SaulGoodLives) and interactions in Thailand. Right now, the team is heads down focused on building Vita. Currently, they are working on adding physical movement and wheels to Vita.
The team includes an experienced hardware maker, a Full stack developer, and a 3D veteran.
@metrox_eth - Hardware maker. Snapshot labs, SODA, worked with big names like Ethereum foundation, Tim Beiko, Eva Beylin, The Graph.
@samuvdoteth - Full stack developer, Experimenter, studied electronics, Specialised in automation and robotics
@syphon3d - 20+ years 3D and Computer Graphics
Have a look at this quote from my discussion with one of the founders:
"When you forget you are talking to a system, does that count as perceiving it as a conscious system, and does the interaction matter? Yes. I have met a lot of robots and, tbh, most still fail at feeling alive. Vita might be a breakthrough on that front. We are building toward that boundary and we have a lot of fun." [https://t.co/b09xrD8Tb7]
The team is building at the boundary of innovation and no matter what, they build in any market condition.
SHOW aims to be participatory and community oriented enabling faster shipping, public learning, and opportunities for the community to co-create with them.
A robotics project for your watchlist!
CC: @SHOW_ROBOTICS | @VitaNovaShow | $SHOW
👀🐳 We’ve seen our whales accumulating $SHOW before the market correction.
The team (@metrox_eth, @syphon3d, @samuvdoteth) hasn’t stopped cooking.
@SHOW_ROBOTICS is an innovative crypto/AI project building real-world robots.
🔥 Their Vita robot (@VitaNovaShow) is constantly being upgraded. Next major upgrade: locomotion—Vita is getting 4 wheels and will soon move around.
We’re designing a new way for the community to shape Vita directly, not just by watching her grow and interacting with her through Twitch chat but by guiding her personality through their own preferences.
Direct Preference Optimization (DPO) updates the LLM by fitting a reward-free pairwise preference objective, nudging the policy logits toward the chosen reply and away from the rejected one with a KL regularizer to a frozen reference model
We turn that into Community Preference Optimization (CPO), where $SHOW holders see several Vita replies, choose accept/reject + set simple flags for why, and those selections eventually will update her base model. The flow is lightly gamified in a virtual setting that simulates real world interactions with generated context. Access will be token gated and high quality contributions will earn rewards. Vita grows with you
🚀 $Show by @SHOW_ROBOTICS only on @virtuals_io, the future of digital innovation 🤖✨
What if a fairytale became the reality? 🦾
Cutting-edge virtual robotics merging tech + imagination. Don’t miss your chance to be early.
#DYOR#ShowRobotics#Virtuals#AI#Innovation $Virtuals





















![CryptoKatze's tweet photo. Projects to watch in the $VIRTUAL ecosystem P4
Project: Show Robotics | VitaNovaShow
Type: Embodied AI and Robotics
Outlook: Mid-to-Long Term
AI and Robotics is a core narrative in the @virtuals_io ecosystem. The team at SHOW Robotics are building at the intersection of entertainment, AI, and Robotics.
Show Robotics is an open lab building expressive robots and AI characters in public. Building for 8+ months, they are building at the crossroads of physical robots, ai, web3, and entertainment.
They are pioneers in the IP Robotics space with huge potential for growth. Think about your favourite robot characters: Wall-E, R2-D2, The Iron Giant, and Bender, this team is bringing that entertainment vision to life.
Vita is their first product and is "a first-of-its-kind IP agent, an expressive AI personality uniquely enabled by its robotic embodiment to explore, observe, and learn from the physical world and engage with the people who cross its path."
Once ready, Vita will be livestreaming it's adventures (Twitch and SaulGoodLives) and interactions in Thailand. Right now, the team is heads down focused on building Vita. Currently, they are working on adding physical movement and wheels to Vita.
The team includes an experienced hardware maker, a Full stack developer, and a 3D veteran.
@metrox_eth - Hardware maker. Snapshot labs, SODA, worked with big names like Ethereum foundation, Tim Beiko, Eva Beylin, The Graph.
@samuvdoteth - Full stack developer, Experimenter, studied electronics, Specialised in automation and robotics
@syphon3d - 20+ years 3D and Computer Graphics
Have a look at this quote from my discussion with one of the founders:
"When you forget you are talking to a system, does that count as perceiving it as a conscious system, and does the interaction matter? Yes. I have met a lot of robots and, tbh, most still fail at feeling alive. Vita might be a breakthrough on that front. We are building toward that boundary and we have a lot of fun." [https://t.co/b09xrD8Tb7]
The team is building at the boundary of innovation and no matter what, they build in any market condition.
SHOW aims to be participatory and community oriented enabling faster shipping, public learning, and opportunities for the community to co-create with them.
A robotics project for your watchlist!
CC: @SHOW_ROBOTICS | @VitaNovaShow | $SHOW](https://pbs.twimg.com/media/G6sTqtlWEAA0mg3.jpg)
































