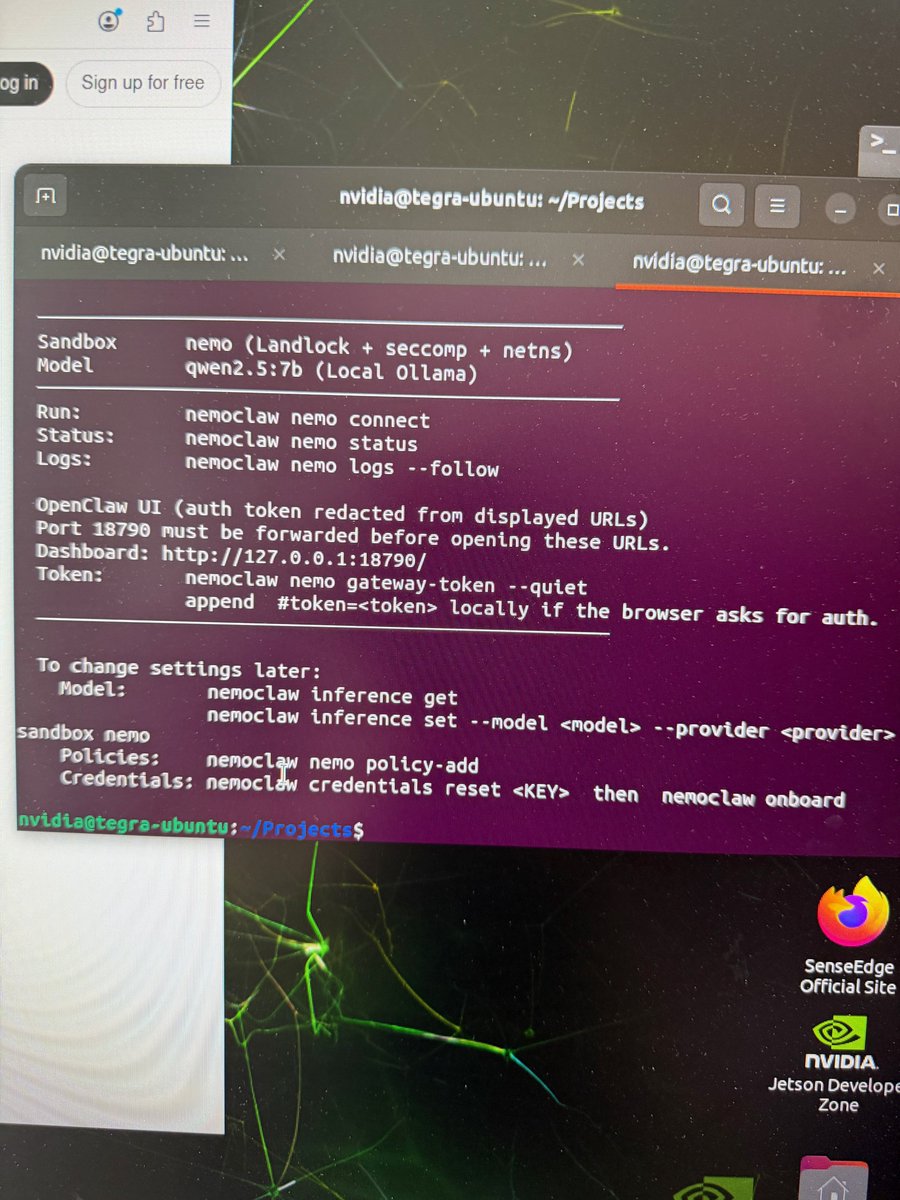
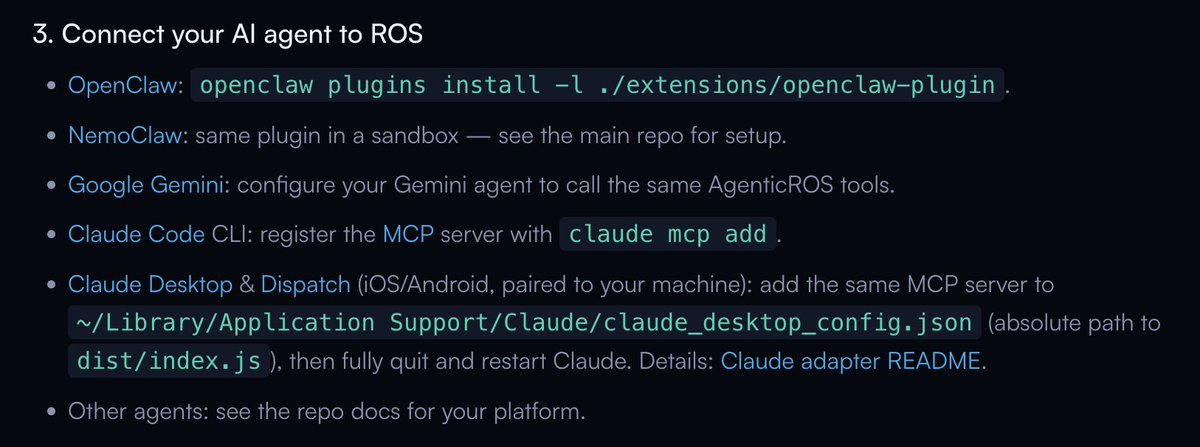
I was amazed at how easy it was to install @NVIDIAAI 's #NemoClaw on the @AVerMedia SenseEdge Development Kit (Orin Jetson) and integrate it seamlessly with my @AgenticROS#PhysicalAI framework with #ROS2 and @RealSenseai support!
I was also pleasantly surprised that it had built-in support for @ollama + QWEN v2.5 LLM/VLM running locally!
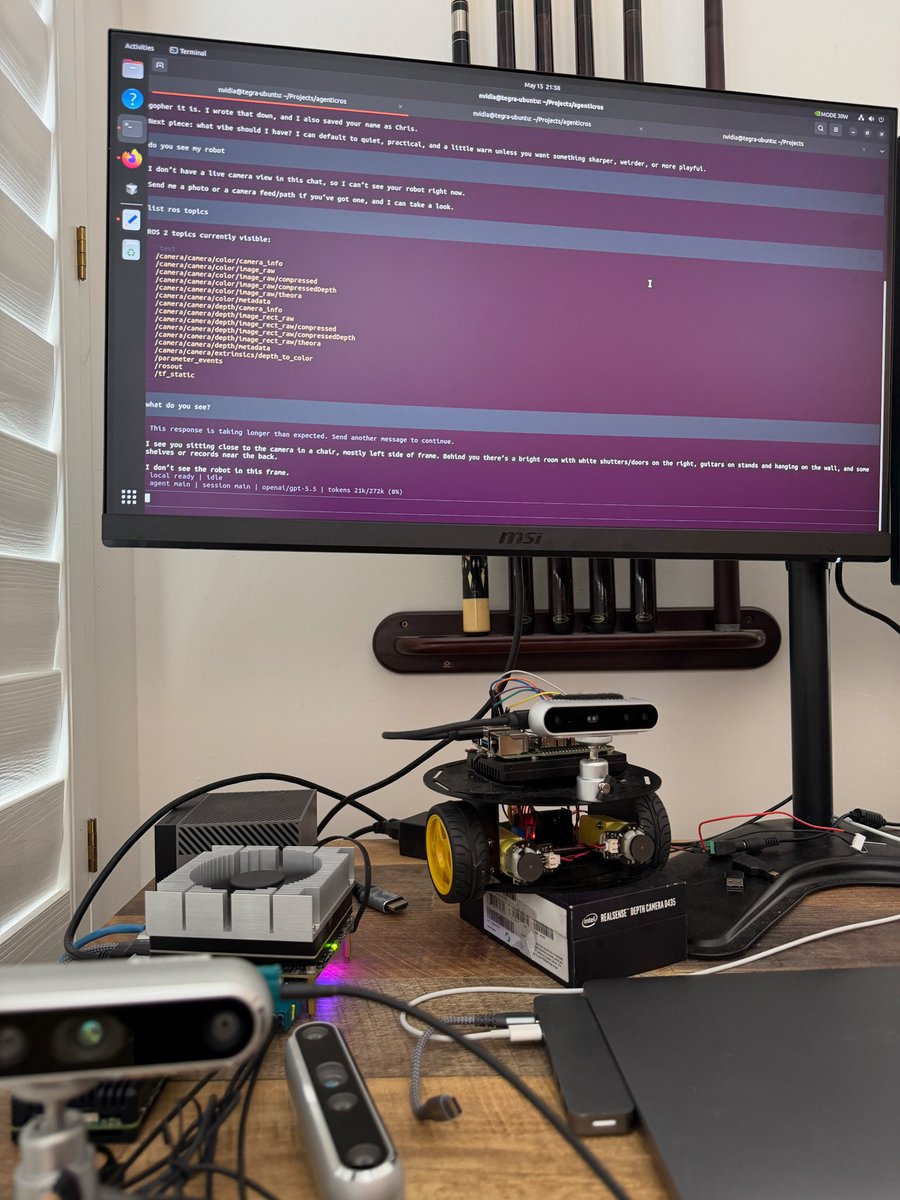
Notice on the last screen shot, I asked NemoClaw to list its ROS topics and you can see all of the RealSense camera topics already streaming. I next asked, what does the robot see? It answered, "I see you sitting close to the canera in a chair, mostly left side of frame. Behind you there's a bright room with white shutters/doors on the right, guitars on stands and hanging on the wall, and some shelves or records near the back."
AgenticROS now has support for skills allowing you to add Follow Me or other skills to form Physical AI missions. More details available at https://t.co/IneKnIJ2Yu
Agentic AI is moving from software-only workflows into the physical world.
That shift needs a bridge between agent frameworks and real robot systems. That’s what we’re building with @AgenticROS.
AgenticROS connects AI agents to ROS2-powered robots through a shared robotics runtime that supports #ROS2 topics, services, actions, parameters, camera snapshots, depth sensing, and safety-checked actuation.
It currently includes adapters for @OpenClaw, @NVIDIAAI #NemoClaw, @claudeai, @OpenAIDevs #Codex, and @GeminiApp with transport support for Zenoh, rosbridge, local DDS, and WebRTC. That means the same robot capabilities can be exposed across multiple agent platforms while keeping the robotics layer consistent.
The bigger idea is an open foundation for Physical AI:
- Agents should be able to perceive through @RealSenseai stereo depth sensors
- They should reason over robot state and environment context
- They should safely act through ROS2 control interfaces
- New behaviors should be installable as skills rather than hardcoded into the core
- Robotics developers should be able to bring their existing ROS stacks into agentic workflows
AgenticROS also includes an open skill/plugin architecture, so capabilities like following a person, querying perception models, navigating, manipulating objects, or integrating external AI services can be added as modular packages.
The goal is simple: make ROS-powered robots accessible to agentic AI systems without locking developers into one model, one agent framework, or one robot platform.
Agentic AI needs a body. ROS-powered robots already have one. AgenticROS is the connective tissue. More details at https://t.co/IneKnIJ2Yu
FYI - @AgenticROS Now Supports @nvidia#NemoClaw bringing Physical AI Agents to #ROS Robots
Excited to share that AgenticROS now supports NVIDIA NemoClaw as a first-class AI agent platform for ROS-powered robots.
NemoClaw packages OpenClaw inside a policy-enforced OpenShell sandbox with managed inference. AgenticROS extends that environment into the physical world by connecting the sandboxed agent to ROS 2, RealSense, and robot control interfaces.
With the new NemoClaw integration, an agent can:
- Use ROS 2 tools for topics, services, actions, parameters, camera snapshots, and depth sensing
- Connect from the NemoClaw sandbox to host-side ROS / RealSense / rosbridge over a controlled network policy
- Access robot perception and actuation while keeping the AI runtime sandboxed
- Run AgenticROS as an OpenClaw plugin inside NemoClaw
- Support real robot behaviors through the AgenticROS skill architecture
The recommended setup keeps ROS 2 and @RealSenseai on the host, where hardware drivers already work well, while NemoClaw runs the agent and AgenticROS plugin inside the sandbox. That gives us a clean split: robot hardware and ROS on the edge, agentic reasoning and tool orchestration inside a governed AI environment.
This is an important step toward Physical AI: agents that do not just reason over text or workflows, but can perceive, decide, and act through real ROS-powered robots.
AgenticROS now supports OpenClaw, Claude/Codex, Gemini, and NVIDIA NemoClaw as agent platforms, all sharing the same robotics foundation.
Agentic AI is getting closer to the robot. AgenticROS is becoming the bridge.
More info: https://t.co/rMrn5UkixZ
/cc @NVIDIARobotics@NVIDIAAI
ClaudeCode now has a Desktop and a Mobile app with files and apps access like #OpenClaw. @AgenticROS now supports all of them to give AI control over #ROS robots from your phone! https://t.co/ziLgJQ3eOh
Here is your #ROS and open source robotics news for the week of March 9th, 2026:
☀️ROSCon Global 2026 Call for Proposals is out!
☀️GIANT ROS By-The-Bay meetup for NVIDIA GTC
☀️GSoC program drops Monday
☀️A full LeRobot SO-101 stack w/ ROS 2
☀️Tactile sensor for @LeRobotHF
⬇️⬇️
Run @AgenticROS with @NVIDIA#NemoClaw:
1) Add the AgenticROS plugin to the NemoClaw sandbox (image or mount).
2) Set plugins.entries.agenticros in the sandbox’s OpenClaw config.
3) Allow egress to your robot (Zenoh/rosbridge) in OpenShell network policy.
4) Restart the gateway. Same OpenClaw plugin API—no code changes.
https://t.co/cWdyt534X5 https://t.co/GlqxUv90QD
#ROS #OpenClaw #Robotics #AI
Added #MCP support to @AgenticROS to connect to @AnthropicAI (in addition to @openclaw ) to interact with my #ROS robot via Claude Code CLI!
AgenticROS now supports multiple AI agents!
Inspired by ROSClaw, AgenticROS is a new open source multi-AI agent robotics platform that connects #ROS to #OpenClaw (and other agentic systems) to enable Physical AI. It supports @RealSenseai stereo depth cameras, #ROS2, #Zenoh messaging, #TeleOp, and missions! https://t.co/IneKnIJ2Yu