Dexterous hands are trapped in the impossible triangle of cost, durability, and dexterity. A fundamentally new way of thinking is necessary to make the leap.
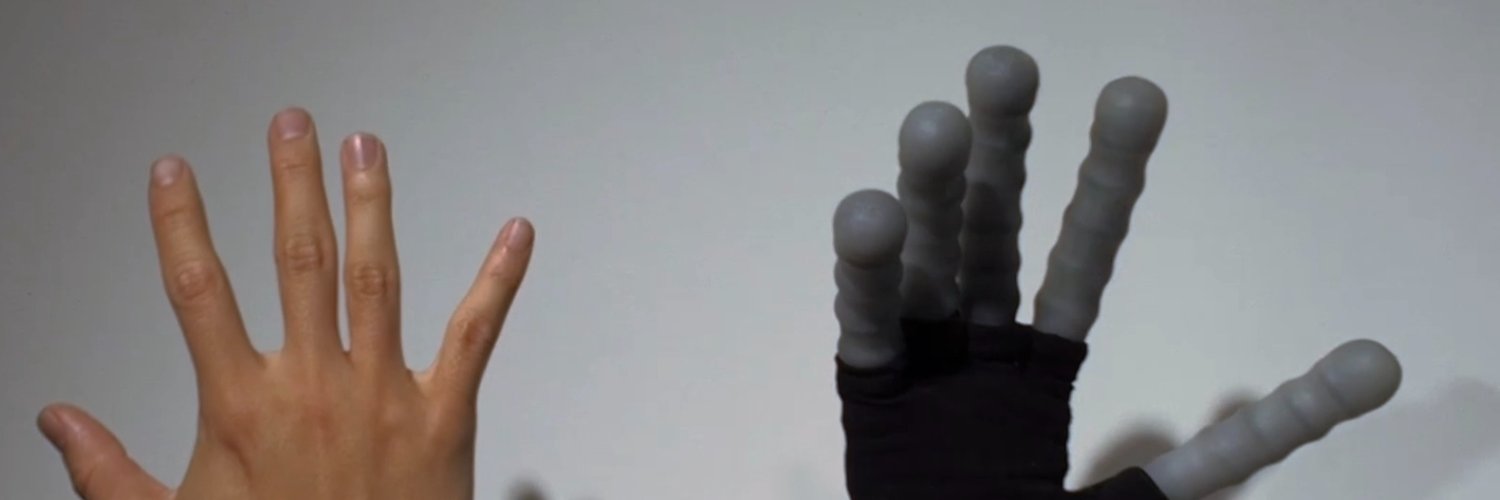
How can we build robotic hands with truly superhuman dexterity? @DaxoRobotics is developing a unique tendon-driven soft robot hand, which aims to be tougher and more capable than a traditional humanoid hand. Each finger consists of many different tendons, which act in concert to move or manipulate.
This is a special episode of RoboPapers where, instead of talking about a scientific paper, we talk to @tom_jiahao, founder of Daxo Robotics, in order to learn both about his background and about how this one-of-a-kind robot hand design works.
Watch Episode #40 of RoboPapers with @micoolcho and @chris_j_paxton now!
Solid "handshake" from a cool visitor to our new Austin office @DaxoRobotics. We are still surprised every time we interact with our robotic hand -- it has a strong grip but doesn't hurt you.
So much fun nerding out with Scott @GoingBallistic5 on robotics and hand design. Come visit again when v1 is ready!
P.S. if you are a mechanical engineer with experience in mechanism & actuator design, DFM, rapid prototyping (sheet metal, laser cut, 3D print), please DM me.
Looking for an experienced mechanical engineer in Austin TX.
We iterate in a matter of weeks. You will lead a paradigm shift in robotics with our team. We promise magic very very soon.
"What are the use cases for your robot?"
Having to ask this question is a problem in itself. Why don't we ask ourselves why we buy a smartphone or a laptop?
True generality brings economies of scale and the largest market. It just needs to be done right.
Daxo Robotics teased 'superhuman dexterity' for its in-development robotic hand
In the video, the soft hand can be seen holding a pen backward, suggesting it may be able to write backward — thus the superhuman ability
Details remain under wraps
We are working on something that has never been done before in robotics. Incredibly challenging but will set the foundation for superhuman dexterity.
Stay tuned.
Why infinite DoF?
In contact-rich manipulation, what matters is where and how much force is applied. Low-DoF hands do not have the capacity to match the contact complexity of the human hand — making it hard to learn from human demos.
Build that capacity first.
Redundancy and high dimensionality are overlooked in robotics. They are crucial aspects to building a "complex" system, instead of just a "complicated" system. What you get is speed, smoothness, robustness, and performance.
(4/n) Our bet on soft mechanisms started when I first built a parallel continuum robot arm a few years ago. The smoothness and versatility were astounding. We then found ways to boost the durability, payload, and precision. Attaching a video of the soft robotic arm I built.
Introducing Muscle v0 -- infinite degrees of freedom, from @DaxoRobotics. A different mountain to climb - with a far more beautiful peak.
We built this from the ground up:
- Ultra-dexterous
- Built for machine learning
- Durable and robust
More below (1/n)