I have just made our latest product (Modos Flow) open-source: https://t.co/FYoKwDrdlN. With complete source code (for both MCU and FPGA) and PCB design source file in KiCAD. It's a 300-ppi Eink portable monitor with 60Hz refresh rate and touch screen:
We are back again :) After three weeks of quiet building.
Introducing Genesis World 1.0, our latest simulation platform, the second release in our full-stack suite. Open-sourced.
Robotics is still bottlenecked by the 1× speed of the physical world. Every model, checkpoint, and data recipe eventually needs to be tested on physical hardware, slowly, expensively, and with limited coverage.
One hour in reality can become 100 days in simulation. That is how robotics model iteration moves from a wall-clock bottleneck to a compute problem.
To make this work, simulation has to be both fast and trustworthy.
Over the past year, we rebuilt the entire stack: a GPU-accelerated cross-platform compiler, penetration-free multi-physics contact solvers, unified rigid and deformable physics, and a photo-realistic renderer purpose-built for physical AI applications.
We built Nyx, a high-performance path-traced rendering engine for robotics application.
Genesis World 1.0 achieves near realtime performance with our latest development for penetration-free IPC solver, supporting various types of deformables beyond rigid bodies. It supports contact-rich, dexterous manipulation simulation across different embodiments: unitree, sharpa, wuji, genesis hand and various types of grippers.
Under the hood is Quadrants, our effort in pushing forward cross-platform GPU-accelerated computation. Quadrants started as a fork of Taichi, and we rebuilt most of the critical parts for optimizing simulation workloads, giving 10x faster launch time and up to 4.6x runtime performance compared to the initial Genesis release.
Together, they bring us to an unprecedentedly low sim-to-real gap, enabling zero-shot real-to-sim model evaluation and much faster iteration of GENE.
All available today.
Genesis World 1.0: https://t.co/aknCM3eqws
Quadrants: https://t.co/uXqPNI4cb6
Nyx: https://t.co/R8j0djqGnV
📢📢GenRecon: Bridging Generative Priors for Multi-View 3D Scene Reconstruction📢📢
Reconstructing high-fidelity 3D scenes from sparse RGB input is hard. It needs a strong 3D prior!
We reformulate multi-view scene reconstruction as conditional 3D generation over overlapping spatial chunks, lifting posed image features into a generative shape prior via 3D conditioning. As an example prior, we build on Trellis2, and train it such that its reconstruction is pixel aligned and matches from all views.
GenRecon achieves unprecedented reconstruction quality from any sparse RGB input sequence, even from a phone capture. The reconstruction also includes PBR materials which facilitates relighting and virtual object insertion.
https://t.co/1RMD40WRpz
https://t.co/u4IEi5PTtn
Amazing work by @katha_schmid, @nicolasvluetzow, Jozef, @angelaqdai
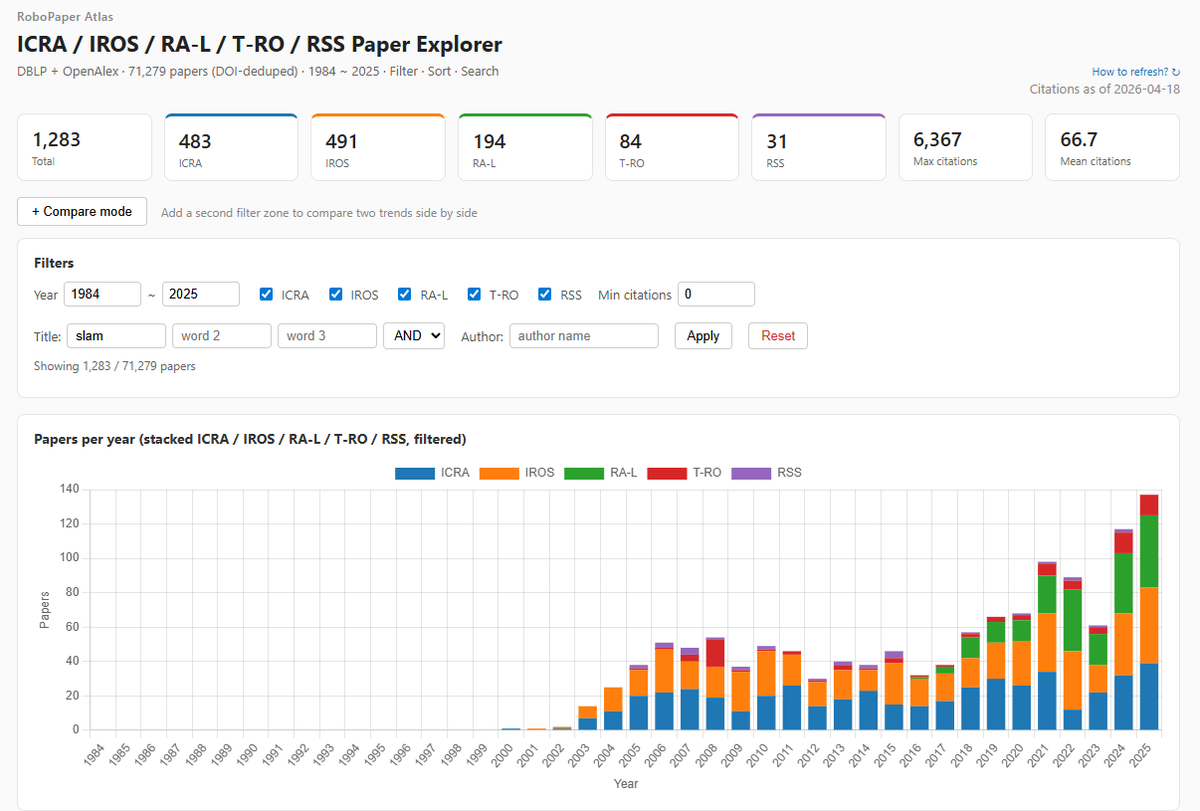
When did "SLAM" show up, and where is it now? 🔍
I vibely built RoboPaper Atlas to see the field evolve.
71,000+ robotics papers from ICRA, IROS, RA-L, T-RO, and RSS (1984 ~ 2025), turned into live visualizations
Link: https://t.co/SxyW3W4Y0p
📢GaussianGPT: autoregressive 3D Gaussian scene generation.
We introduce a GPT-style model that directly generates 3D Gaussian scenes, token by token, in a series of small, discrete decision steps. Generation, completion, and large-scale outpainting in a single pipeline.
Unlike diffusion-based approaches, GaussianGPT explicitly models the scene distribution at every step, allowing for quite flexible scene synthesis.
🌐 https://t.co/Ewv4CyLD2O
▶️ https://t.co/zKOugfD9gl
Great work by @nicolasvluetzow, @barbara_roessle, @katha_schmid
Computing a convex decomposition of a shape is a classically-hard geometry problem, yet essential for fast physics simulators.
Yuezhi found a way to accelerate it by training a large model!
Da*m this is good stuff
I really want JAX/PJRT stuff but Google made the PJRT/XLA binaries absolute nightmare to build and let's not even talk about the ABI and ODR issues
@signalgaining just pushed a new library! TensorRT-Swift allows you to run various AI models on WendyOS or other Linux + NVIDIA machines.
https://t.co/5gfNStLUnA
We're working hard on improving it further, bringing high performance AI to all Swift developers.
lololol rip drone
Seriously, I am astounded that Jackie and Kabir shipped so much with such a tiny team. I guess it also kinda reflects my long stance that the Mythical Man-Month is a must read for everyone :)
8 years of building an autonomous robotics company in ~60 seconds.
Cursing, crashes, breakthroughs -- and a lot of robots in the supply chain.
Here’s why we chose this as our life’s work. (1/5)
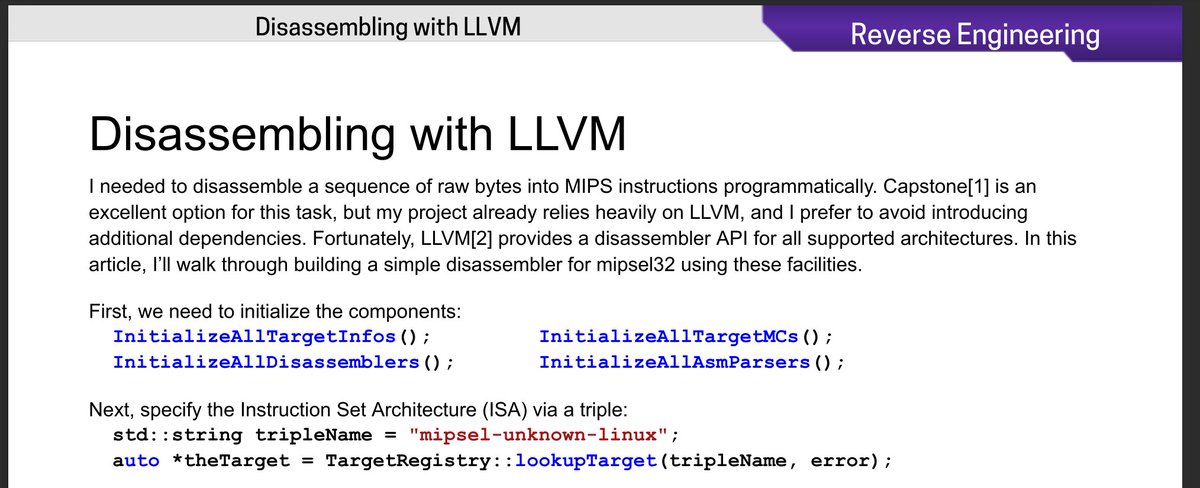
A few articles from the @pagedout_zine #7 that I found interesting:
* Disassembling with LLVM: using LLVM API for disassembling.
* Obfuscating Crypto Constants: generating crypto constants in runtime.
* Turning a GCC anti-debug trick into a LCE
Easy and quick to read :D
We trained a state-of-the-art diffusion VLM, A2D-VL 7B for parallel generation by finetuning an existing autoregressive VLM on the diffusion language modeling task, using the masked diffusion framework which "noises" tokens by masking them and "de-noises" tokens by predicting the original tokens.
We develop novel adaptation techniques that gradually increase the task difficulty during finetuning to smoothly transition from sequential to parallel decoding while still preserving the base model's capabilities, by annealing both the block size and the noise level.
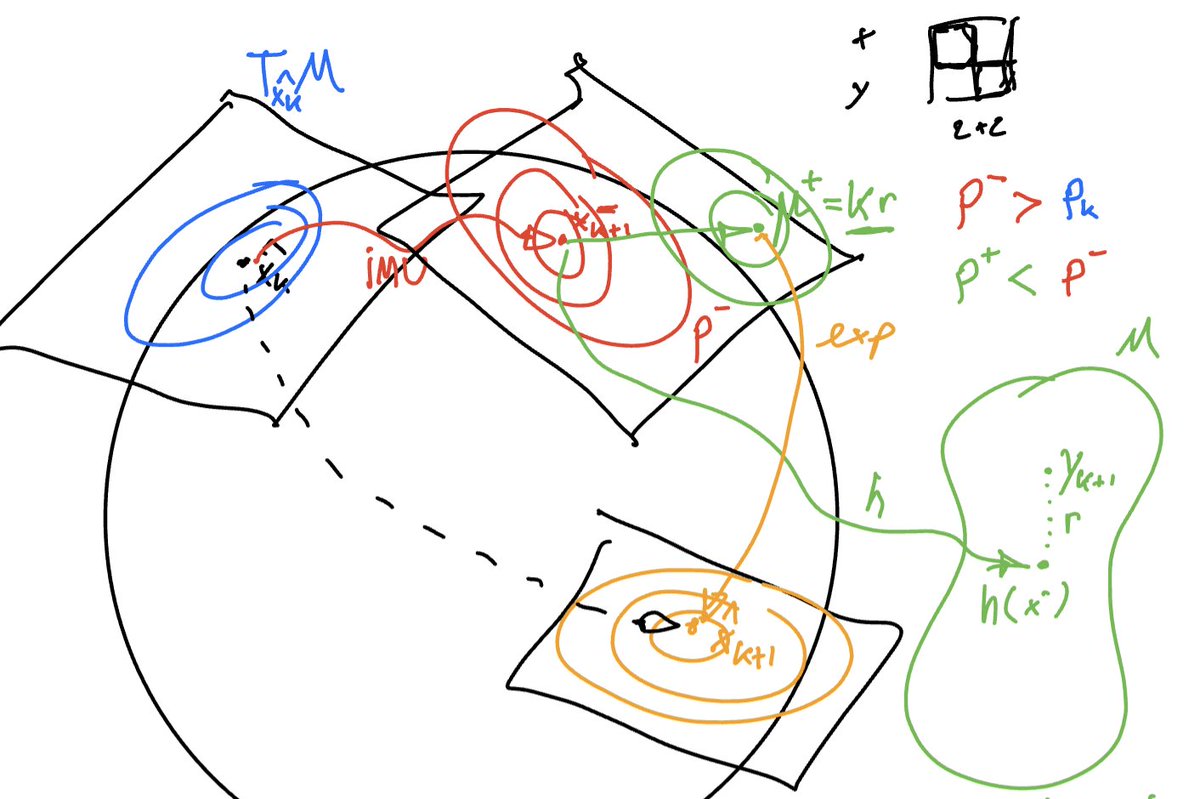
New paper on arXiv! And I think it's a good'un 😄
Meet the new Lattice Random Walk (LRW) discretisation for SDEs. It’s radically different from traditional methods like Euler-Maruyama (EM) in that each iteration can only move in discrete steps {-δₓ, 0, δₓ}.