Introducing KITE 🪁, a paradigm that transfers the interaction intent instead of joint-space actions across structurally different manipulators. Deploying on a new robot needs only its kinematics model (URDF), no new task demonstrations. 🧵1/8
Check out our paper and project page for more details!
🌐 Website: https://t.co/wWfy2O07Il
📝 Paper: https://t.co/Ob7eqK9dPU
Huge thanks to my collaborators Shitong Liu, @chaof1234 , Meryl Zhang, @XuanchenLu , and mentors @andrewhowens , @KuanFang .
Introducing Unified Motion-Action (UMA) Model, a robot foundation model that uses 3D object motion as a shared interface for heterogeneous robot learning. UMA treats motion and action as co-evolving variables, enabling knowledge transfer across data sources and versatile inference. 🧵 1/n
Our analysis isolates the design choices that matter, confirms that UMA scales with both data and model size, and traces its remaining errors to execution rather than perception. 10/n
CorDex utilizes 3D contact keypoints to transfer grasping knowledge from single human demonstrations to hundreds of synthetic objects. Check out our work on ArXiv!
🚀Excited to share our #ICRA2026 work, CorDex!
CorDex learns functional dexterous grasping from a single human demo, generalizes to unseen objects using a single-view observation, and enables robots to use tools for long-horizon tasks.
Project Page: https://t.co/LAkO8LkhK5
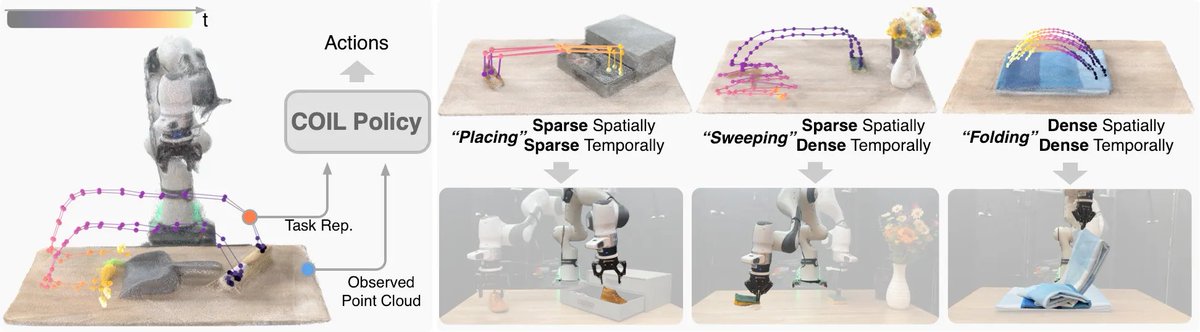
Introducing Correspondence-Oriented Imitation Learning (COIL), a self-supervised framework for robotic manipulation using 3D keypoint trajectories as a flexible, unified task representation!