These three sentences remind me that the future is faster than you think.
“Figure has gone through 4 major breakthroughs that probably accelerated our timeline by a decade.”
“We train these controllers entirely in GPU-accelerated physics simulation using reinforcement learning.”
“This fundamentally breaks the old thesis that walking robots are inherently too hard or too unstable to scale.”
Figure just completed 200 hours of logistical work at human speeds without a failure.
The humanoids are coming and faster than the founder of @Figure_robot ever thought possible.
Figure just turned 4 years old
The ride so far has been surreal, and I wanted to share my perspective on what’s happened over the last four years
When I started Figure, the core technologies were still extremely nascent. Humanoid hardware was heavy, hydraulic, unsafe, expensive, and unreliable. Deep learning also wasn’t there yet - there was no real AI precedent and no clear path to building a truly general-purpose robot
My expectation was always that humanoid robotics would become the largest industry in the world, but that it would take a very long time to put all the hardware and AI pieces together
Honestly, I assumed it would take 20 years just to have a real shot at solving general robotics - decades before we could seriously attempt to build iRobot in real life
Instead, everything has moved much faster than I ever expected. Figure has gone through 4 major breakthroughs that probably accelerated our timeline by a decade:
> Cheap electric humanoid robots are now possible. There are many reasons for this but some include benefits from actuator torque density, sensor technologies, battery specific energy, high flop/memory onboard compute, and high-rate manufacturing techniques all helped significantly. At this point, we’ve largely de-risked the hardware side and it’s becoming a straightforward engineering problem (highly difficult engineering but tractable)
> Deep learning from camera pixels to torques actually works. The dimensionality of a humanoid robot is simply too high for hand-written code. You have 40+ motors that can rotate continuously, creating more possible robot body states than atoms in the universe. There is no path to building a truly general-purpose robot with heuristics and manually programmed C++ logic. This has to be AI-first, and Helix has now demonstrated that repeatedly
> Whole-body RL control changed everything. It’s what keeps the robot balanced, allows it to use stairs, move its arms, and coordinate its entire body through the world. We train these controllers entirely in GPU-accelerated physics simulation using reinforcement learning. The robustness is far beyond anything we ever achieved with hand-written heuristics. This fundamentally breaks the old thesis that walking robots are inherently too hard or too unstable to scale
> These robots can now perform useful human-like work at human-level speeds. This is an insanely hard problem because humans perform millions of different tasks in the real world - and Figure has to do this with 1 hardware platform in a general purpose architecture. btw, yesterday Figure completed a logistics use case running continuously for 200 hours without a failure - all with scalable hardware and internal AI models
The future is starting to feel very real
We have a real chance to build iRobot in real life - the good version
Thank you for everyone's support. Pedal to the metal
Scaling #datacenters shouldn’t require ripping everything out. Hear how operators can scale with confidence through integrated infrastructure. Watch #JSATV with #OptiCool's Matthew Roberts and our Brian Kennedy on our partnership https://t.co/7KJzizCjZC #AIInfrastructure
Imagine every pixel on your screen, streamed live directly from a model. No HTML, no layout engine, no code. Just exactly what you want to see.
@eddiejiao_obj, @drewocarr and I built a prototype to see how this could actually work, and set out to make it real. We're calling it Flipbook. (1/5)
Space jellyfish alert!
Starlink 17-14 from SLC-4E in California on April 22, 2026 at 7:55:20 PM PDT could produce a space jellyfish. This occurs when a rocket and its expanding exhaust plumes are illuminated by the sun and observers are in local darkness.
The rocket will enter sunlight 01m20s after launch.
See a detailed prediction for your location: https://t.co/KIadNi37so
Information as of 2026-04-22 13:41 UTC
"We came all this way to explore the Moon, and the most important thing is that we discovered the Earth."
Bill Anders Apollo 8 astronaut December 24, 1968
Earthset.
The Artemis II crew captured this view of an Earthset on April 6, 2026, as they flew around the Moon. The image is reminiscent of the iconic Earthrise image taken by astronaut Bill Anders 58 years earlier as the Apollo 8 crew flew around the Moon.
We see our home planet as a whole, lit up in spectacular blues and browns. A green aurora even lights up the atmosphere. That's us, together, watching as our astronauts make their journey to the Moon.
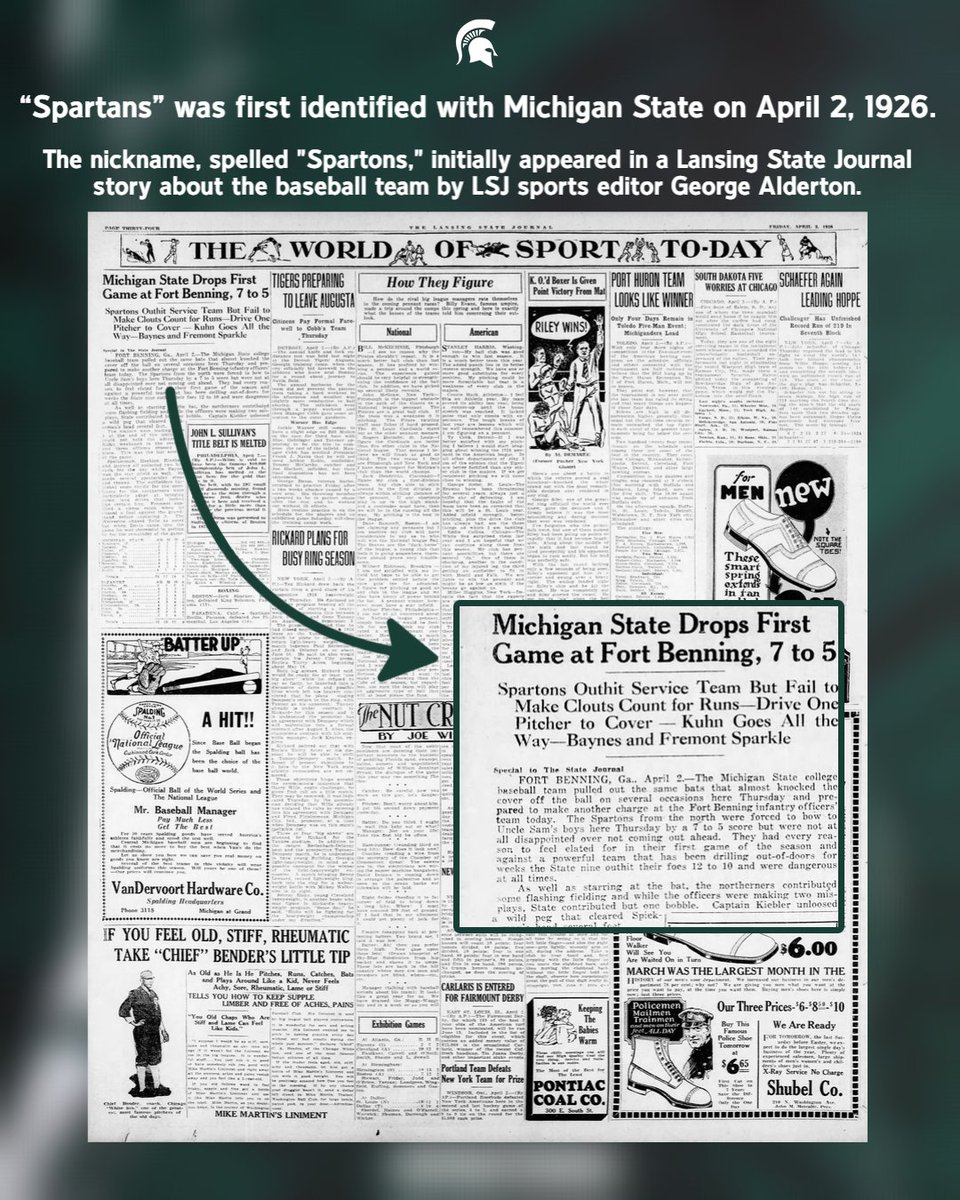
On this day 100 years ago, the name “Spartans” was first identified with Michigan State.
The nickname, spelled "Spartons," initially appeared in a Lansing State Journal story about the baseball team by LSJ sports editor George Alderton.
The weather's looking good for tomorrow's Artemis II launch, and our teams are getting the rocket ready for liftoff!
Read the latest updates on our mission around the Moon: https://t.co/doIjUqa1cx