Delighted to cap this year off holding @Seancye and @Pradyumna_T. Their legacy for the @core_robotics is immense, pioneering work on generative AI (diffusion models and LLMs). Your leadership will be missed. @zoox and Toyota Research Institute are lucky to have you! To check…
@mlatgt@gtcomputing@GTrobotics Interested in how else diffusion models can be leveraged for robot model learning? Check out more papers by @Seancye et al. from @core_robotics. Check them out:
https://t.co/ZKIcNtDnAV
https://t.co/GNQnEkttVb
https://t.co/uSJQqw4rRa
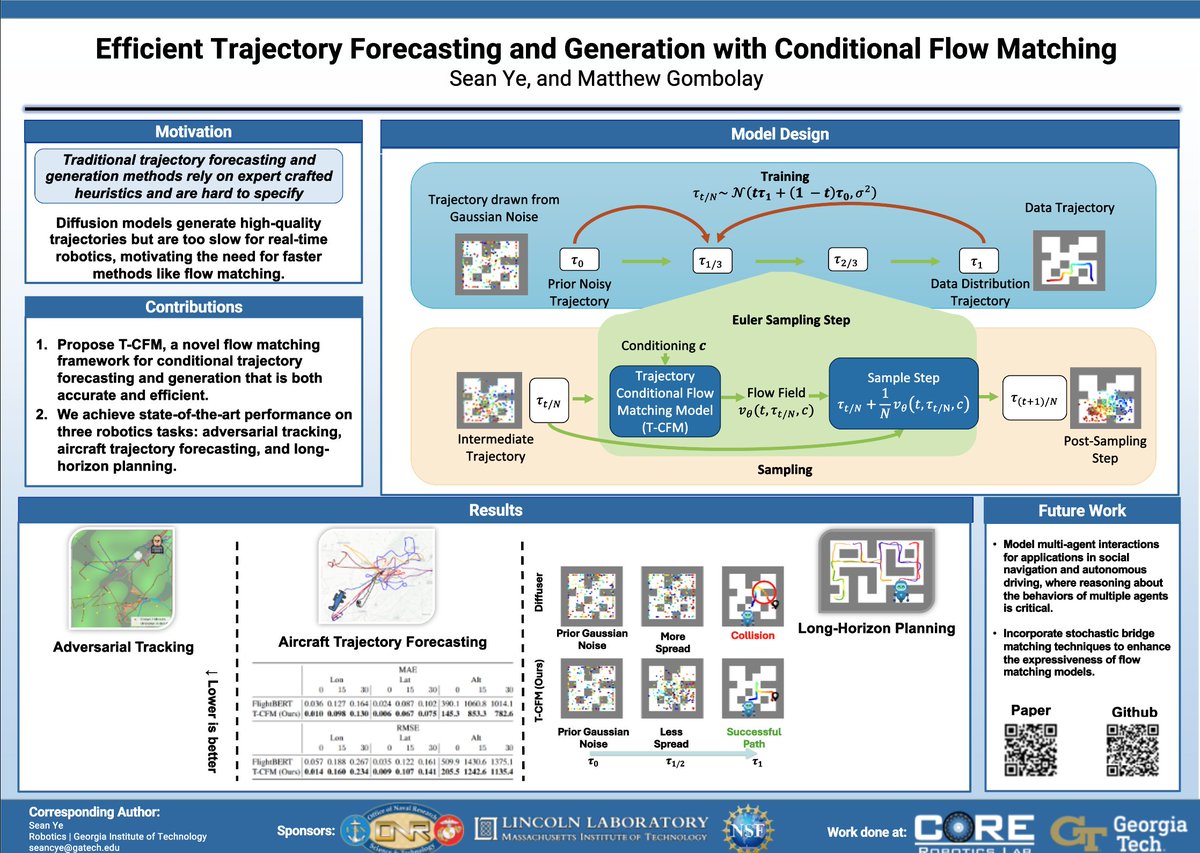
Diffusion models can forecast trajectories, which can help with predicting aircraft flight paths to helping robots generate motion plans in complex environments. Check out our latest work on this topic that Dr. Sean Ye presented #IROS2024! Teaser Talk: https://t.co/lghcYIcmPm
Congrats to Dr. Sean Ye and Dr. Pradyumna Tambwekar on defending their PhDs on "Trajectory Modeling using Generative Approaches for Scheduling, Planning, and Multi-Agent Systems" and "Human-Centered Specification and Explanation for Mixed-Initiative Interactions", respectively!🎉
In a little over a week, I'll be sharing 5 years worth of learnings about robot painting, including cable robot control, optimization, and embodied generative AI!
(deets 👇)
Additionally, if you want to make your very own graffiti art with my robot, DM me within the next week :)
Can Diffusion Models help robots predict agent behavior (a problem in autonomous vehicles (AVs) to narcotics interdiction)? Yes! @Seancye shared his pioneering work @MultiRobotSys in what may revolutionize imitation learning, IRL, LfD, etc. A🧵1/n
Paper: https://t.co/GYPWTZHZak
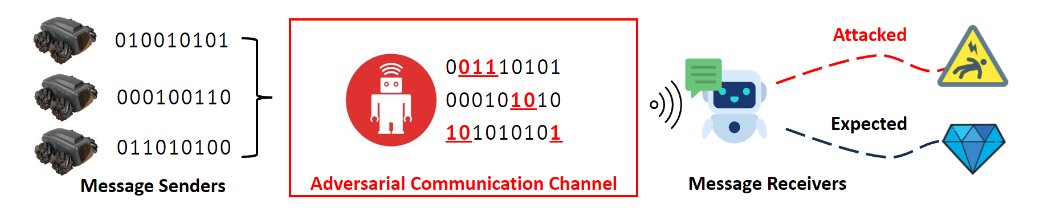
Dive into our research on robot team communication and adversary tactics in our latest paper: https://t.co/pWETgcqNP7 w/Zixuan Wu, Byeolyi Han, and @MatthewGombolay for an in-depth discussion tomorrow (11/7) at our poster and Oral Session 2 (1:45-2:45)! @core_robotics#CoRL2023
Ever wondered if it's possible to hijack a robot team through communication sabotage? Our #CoRL2023 paper reveals how an adversary communication can coerce robots into unsafe actions by altering their message exchanges, all while learned completely offline in a black box manner.
We're outsmarting robot teams without peeking at their playbook! By using the surrogate policies to estimate the ground truth reward, we craft an adversary that can scramble communications, all without ever needing to see their actual reward signal.