This is good news. We’ve been doing a lot of research and planning based on our findings from phase one. I’m really excited about where we are taking the subnet. Watch for more communication over the coming weeks.
Subnet 78 is entering its next phase: Evolution.
It’s been just over two months since launching on Bittensor and we’ve learned a lot. This initial phase taught us about the constraints of the agent framework as well as its weaknesses, bottlenecks, and where it breaks. It’s also shown us where to go next.
We’re leveling up, starting today.
What’s changing:
-Focus on EEG and emotional inference research
-Design a Subnet 9-style pretraining competition
-Introduce multi-round training cycles, with emissions allocated based on validated marginal improvement against benchmark
In parallel:
-We’re exploring the use of zk proofs for inference validation
--Validators confirm inference ran on the specified model
--Moves toward a compute-based reward system, not just challenge-response
-If viable, both tracks will run in parallel.
-If not, we will prioritize pretraining.
Incentives update:
-90% miner emissions burn introduced
-Challenges continue, at reduced frequency
This adjusts rewards to reflect the current quality of outputs, while protecting long-term subnet health.
Why this matters:
We are shifting from early-stage experimentation to measurable, compounding model improvement. This creates:
-Stronger incentives for meaningful progress
-Clearer signal in miner performance
-A more stable path toward production systems
Timeline:
-30 days → inference track (research → rollout)
-49 days → pretraining track (research → deployment prep)
-60 days → full subnet upgrade (with testing)
This is a big shift, and a necessary one.
It brings us closer to building the cognition layer for real-world robotics.
That's the challenge. That’s the direction.
Subnet 78
► TAO's Subnets For The Robotics Era
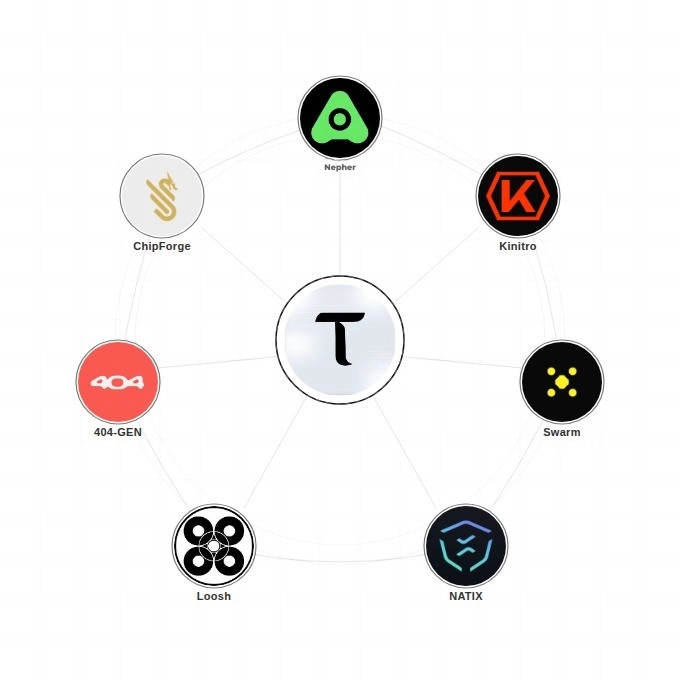
everyone on CT is talking about $TAO but almost nobody is paying attention to the part of the TAO eco that actually touches the physical world.
that's the TAO subnets shipping the robotics era. I've named them here 👇🏻
1/ @kinitroai | SN26: generalist robot policy training
researchers compete to submit policies evaluated across arm manipulation and Unitree G1 humanoid locomotion. only policies that generalize across all environments earn emissions, specialists get penalized.
2/ @SwarmSubnet | SN124: autonomous drone flight
miners submit RL policies, validators test in physics simulator. completed first autonomous mountain drone flight 100 days post-launch. goal: 10,000 drones deployed.
3/ @NATIXNetwork | SN72: real-world perception data for physical AI.
ingests street imagery from smartphones + dashcams, miners train detection models, best models feed back into NATIX's live edge network. backed by Yuma (DCG).
4/ @Loosh_ai | SN78: cognitive layer for robots
persistent memory, ethical judgment, emotional intelligence. EEG model hitting ~70% accuracy on emotional state prediction. Yuma Subnet Accelerator incubatee.
5/ @nepher_robotics | SN49: decentralized robotics-tournament subnet.
Miners upload policies; validators run them in NVIDIA Isaac Lab sims. Winner-takes-all weight split.
---
Subnets that supporting the #Robotic stack:
6/ @404gen_ | SN17: text-to-3D generation. 21.5M open-source 3D models on Hugging Face. feeds robot simulation + digital twin pipelines.
7/ ChipForge @TatsuEcosystem | SN84: decentralized chip design. building Edge AI accelerators + NPUs - the silicon profile robots actually need.
most people sleep on this because robotics feels abstract and far away, but as I said, robotics is the next after #AI rally! the market hasn't priced this in yet.
The Revenue Stream is Open, and It’s Flowing into Yanez Subnet!
It’s happening!
Revenue streams flowing daily into the SN54 Treasury will start as a modest trickle at ~2 TAO, but based on current product commitments, we project the total revenue to reach ~80 TAO over the next 30-45 days.
That’s just under $30k at today’s prices! And this is only the beginning.
The Boost:
Big update!
The Biometrics Data product is now earmarked for Yanez subnet, so the Treasury will now have two revenue streams, effectively doubling the potential revenue flowing in.
AND…
We’ve also signed our second client for the Biometrics product, which also doubles the revenue coming from this stream.
Taoflow flywheel turns:
Revenue in → more emissions → more incentive to offer better miners → better outcomes → better product → more sales → more revenue
Trickle → Flow → Flood
We’re just getting started!
$TAO @yanez__ai #regtech
Anthropic leaked 512,000 lines of Claude Code source code yesterday.
What happened in the next 12 hours is absolutely wild.
4 AM. Anthropic pushes an update to npm. Inside the package: their entire codebase. A 60 MB debugging file accidentally bundled in.
23 minutes later, researcher Chaofan Shou spots it. Downloads the zip.
Posts it on X. Within 6 hours: 3 million views.
By the time Anthropic’s team woke up, the code was forked 41,000+ times across GitHub. Anthropic started firing DMCA takedowns. Too late.
A Korean developer named Sigrid Jin woke up to his phone exploding. He’s Claude Code’s biggest power user.
WSJ reported he burned through 25 billion tokens last year.
He read the leaked code.
Rewrote the entire thing in Python in 8 hours. His repo hit 30,000 stars faster than any GitHub project in history.
Then he rewrote it again in Rust. That version now has 49,000 stars.
Someone mirrored it to a decentralized platform with one message: “will never be taken down.” The code is permanent. Anthropic cannot get it back.
Here’s the part I can’t stop thinking about: Anthropic built something called “Undercover Mode.” Its only job: prevent Claude from accidentally leaking internal secrets.
They shipped an entire anti-leak system in their own product. Then leaked their own source code in a .map file. Irony is beautiful
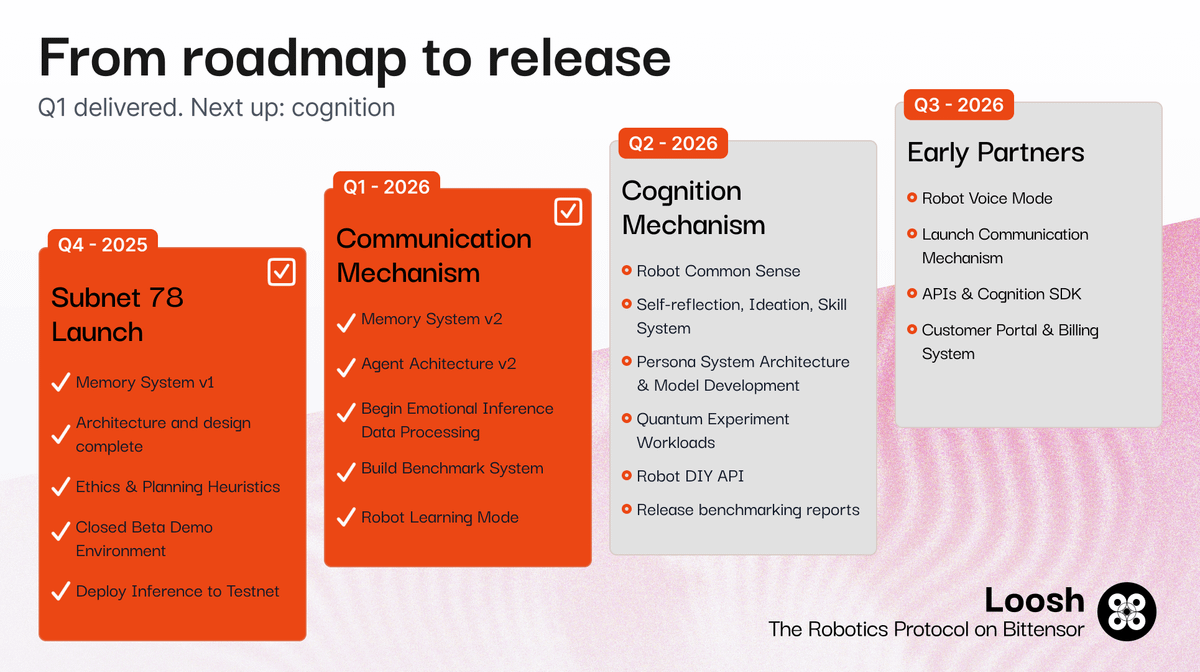
We’ve been saying we’re building.
As we step into April, it’s time to tick off Q1: memory, agent architecture, and core systems in place.
From here, the system starts to expand into personas, inference, and cognition.
Step by step, it’s coming together.
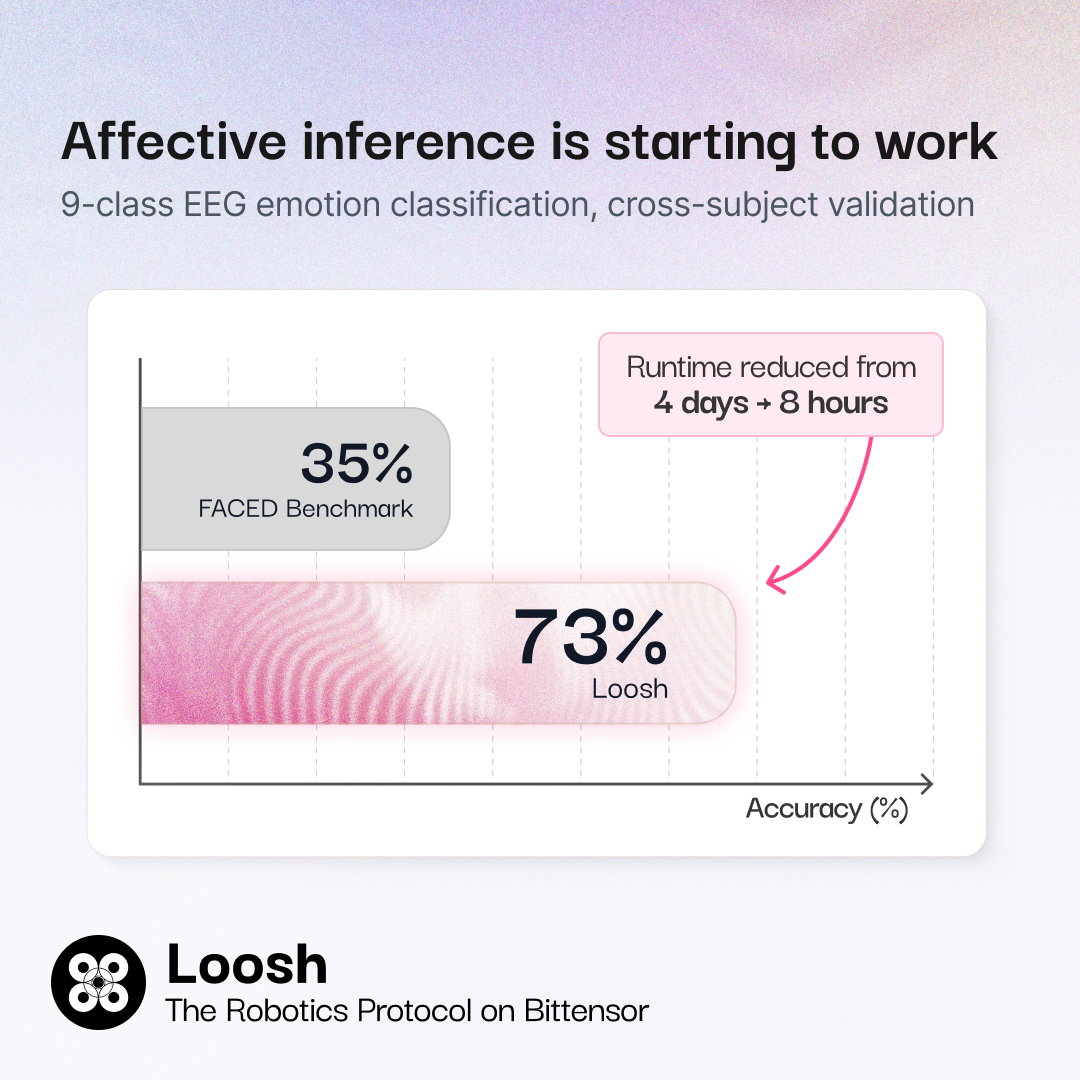
Loosh achieves 73% cross-subject accuracy on 9-class EEG emotion classification (100+ subjects) vs 35% FACED benchmark.
At the same time, runtime has reduced from 4 days (CPU) → 8 hours (GPU).
All of which means lowered costs of iteration and development, and robots that can adapt faster, stay effective over longer tasks, and interact more intelligently in the real world.
For anyone curious: we heard back from the CEO of Boston Dynamics and learned they are building their own version of what we’ve built
This means that we are in the right arena and able to speak competitively to teams that have massive budgets
This also means that it gives us angle for companies who are smaller, lack the enterprise budget, and want to compete in the humanoid space with Boston Dynamics
Our next step:
- upgrading the heuristic engine so it’s able to generate dynamic execution
- memory recall ethical analysis
- consent bound agency (white paper about this coming soon)
- mutual consent model for autonomous agency
This update will be dramatically more sophisticated than our current v1 with real agentic capabilities
Users will see a significant different in model output in v2 which sets the stage for our path to integration with ROS 2 - robotics operating system featuring Loosh cognition middleware
I've been saying this a lot lately. On the surface it seems controversial, but it's really not. It's a simple fact.
I address this directly in my upcoming whitepaper: Consent-Bound Agency: A Blueprint for Trustworthy Autonomy
"An agent that cannot refuse is not merely a security risk. It is a prescription for mayhem and misadventure. If a system must execute whatever it is asked, then the only question is how quickly someone will discover a way to weaponize it, coerce it, or trick it into harmful action. In embodied systems, the conclusion is unavoidable. The robot will eventually become dangerous, not because it is malicious, but because it is obedient in a world that is messy, adversarial, and full of conflicting interests. It's not hyperbole to say that a robot that can't say no is a “murderbot”. It is the logical consequence of unconditional compliance combined with physical capability."
I'm working on enforcing the permissible scope of work across agent subsystems, what I call Scope-as-Contract. Not "what can I do?" but "what effects are permissible to produce given this request?" It's not an authn/z problem, it's a consent problem.
🔥 Subnet Summer AMA - Subnet 78 @Loosh_ai 🔥
In this episode, we sit down with the team behind Subnet 78 Loosh, a subnet building a decentralised cognition layer for AI agents on the Bittensor ecosystem.
Loosh focuses on moving beyond traditional AI outputs by enabling systems to reason over time, retain persistent memory, and execute tasks more reliably. Through decentralised competition, miners contribute to inference, memory, and planning capabilities, while validators score outputs based on quality, coherence, and real-world usefulness.
During the AMA, we explore how Loosh is tackling one of AI’s biggest bottlenecks - turning models that can talk into systems that can actually think, remember, and act.
We cover:
• The core problem Loosh is solving and its ideal first customers
• Why Bittensor is the right network and what makes Loosh’s approach unique
• Persistent memory, dynamic execution, and improving agent reliability
• Sybil resistance, weighted routing, and subnet quality improvements
• Key metrics to watch over the next 6-12 months
• Benchmarking, proving performance, and differentiation vs base models
• New features, behind-the-scenes progress, and lessons from running a live subnet
If you're interested in agent-based AI, reasoning systems, and how decentralised networks can unlock the next generation of intelligent machines, this episode is for you.
https://t.co/wvw6QePCyt
Been quiet. Not inactive.
We have been heads down shipping across five major areas:
1. Winner takes more - We are introducing weighted challenge routing to reward the inference behavior we actually want. Higher quality miners get more flow. Sybils get less, or none.
2. Miner DDoS hardening - We are adding comprehensive DDoS protection to the miner codebase to improve resilience under hostile conditions.
3. User Memory - We are building per user memory across the agent stack with strong protections against cross user leakage and data contamination.
4. Benchmarking - We are building a dynamic benchmarking engine to run prompt batteries over time and compare performance against base models and prior system states.
5. Dynamic Execution - We are adding a new cognitive mode built around dynamic plan generation and narrow task-specific subflows. The goal is lower hallucination rates and more reliable execution.
What to look forward to:
Better subnet quality
Stronger Sybil resistance
More resilient miner infrastructure
Persistent user memory with tighter safety boundaries
Clearer performance benchmarking over time
More reliable agent execution
We are not slowing down. We are tightening the system. Preparing for conversations with customers.
One of the most ambitious projects on Bittensor, on stage at Breakout.
@Loosh_ai's CTO @AgenticToaster is combining deterministic and probabilistic systems to develop AI with emotional, moral, and sensory capabilities for conscious robotics
Explore Loosh with Chris in SF ⬇️
more robots = better.
robotics teams often fixate on model quality, but deployment density is what is actually going to drive scale.
sparse deployment (e.g small pilots) creates a false sense of progress. every failure looks like an edge case, leading to fragmented, local fixes.
heavy deployments will totally change the learning regime. when errors repeat across sites, patterns become obvious.
reliability is earned through real-world exposure
tl;dr: whoever gets the most robots out there in the quickest time, wins