Introducing Tether 🪢, a fun little idea to scale data by having our robot “play” in the real world for over 24 hours, throughout the day and overnight—improving policies from zero to mastery with minimal supervision!
But play is messy, with out-of-distribution scenarios that are hard to anticipate. To perform autonomous functional play in the real world, from just a handful of demos, we propose a highly robust few-shot imitation method that warps demo trajectories using visual correspondences. Then, continuously running it within a multi-task VLM-guided cycle, we generate a data stream that produces 1000+ expert-level demos. This generated data is finally funneled downstream to train imitation learning policies, which improve from zero to near-perfect success rates.
We’ll be presenting Tether at #ICLR2026 in just a few weeks! But before that, deep dive with me… 🧵
We are extending the paper submission deadline to August 18, 2025. Submit your latest work on resource-rational robot learning to our workshop!
Details + updated speaker lineup:: https://t.co/pB190NCpce
Don’t miss our exciting panel discussion!
Is "scaling is all you need" the right path for robotics?
Announcing our @corl_conf workshop on "Resource-Rational Robot Learning", where we will explore how to build efficient intelligent systems that learn & thrive under real-world constraints.
Submission deadline: Aug 8 🧵
Introducing Dynamism v1 (DYNA-1) by @DynaRobotics – the first robot foundation model built for round-the-clock, high-throughput dexterous autonomy.
Here is a time-lapse video of our model autonomously folding 850+ napkins in a span of 24 hours with
• 99.4% success rate — zero human intervention
• 60% human throughput speed
• 4.3/5 quality ratings (set by the client)
A thread on our motivation, insights and results:
1/ 🚀 Presenting PureJaxRL: A game-changing approach to Deep Reinforcement Learning! We achieve over 4000x training speedups in RL by vectorizing agent training on GPUs with concise, accessible code.
Blog post: https://t.co/MjWisJWNTg
🧵
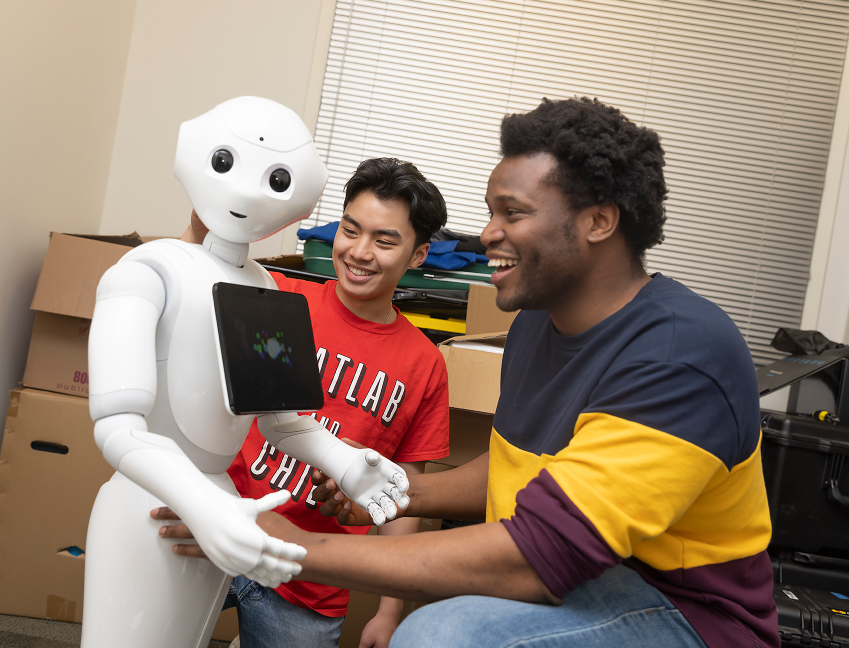
Excited to present our #HRI2023 paper tomorrow in session 1.C (3:30PM CET) with @KinManLee7! Our study investigates the impact of robot skill level and communication in rapid, proximate human-robot collaboration. Link: https://t.co/knjXHlZO0O
But surprisingly we find that assertive intent communication (which used phrases like "Mine!" and "Got it!") led to a significant decrease in team performance (𝑝 = .037) and perceived safety (𝑝 = .009). Learn more at: https://t.co/knjXHlZO0O
Excited to be representing @core_robotics at #HRI2023 in Sweden! Check out our paper Impacts of Robot Learning on User Attitude and Behavior (March 16th at 1:30 pm CET). Link: https://t.co/ybLSZftZgA
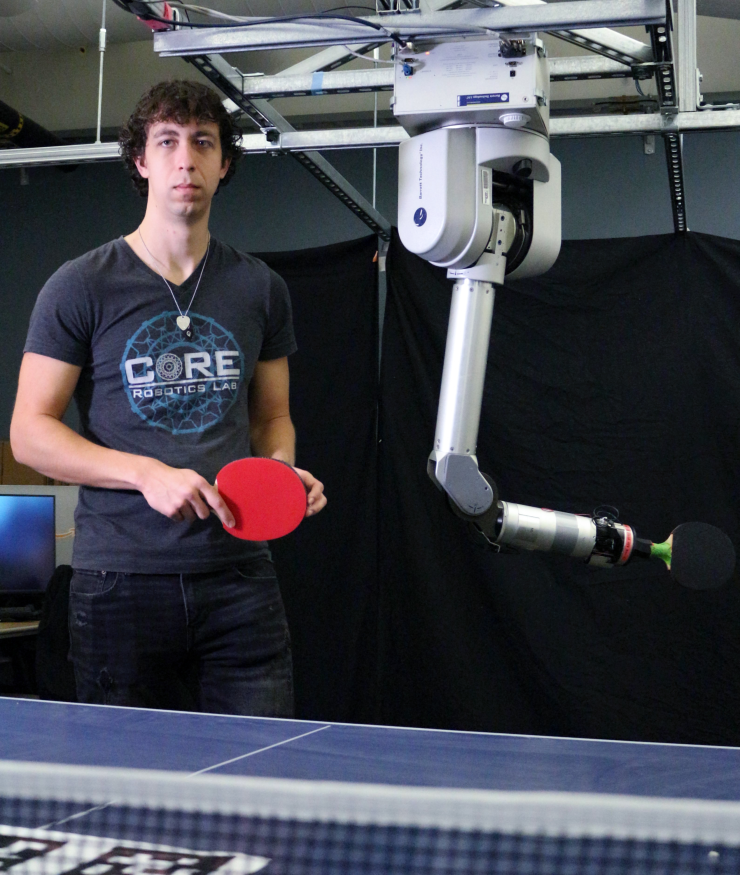
What can table tennis teach us about fast-pace, close-up human-robot interaction? Turns out, a lot! Thanks to @gtcomputing and @GTrobotics for this cool write-up on our latest research coming out at @HRI_Conference by Kin Man Lee, Arjun Krishna, et al. https://t.co/32Vpo6Cvrd
Artificial intelligence is taking robotics research to new heights. @GeorgiaTech experts will present their work with bots that are quick, agile, and collaborative at the @HRI_Conference, March 13-16. Explore the GT roboticists working in #AI now.
https://t.co/DajdSdVR40
While we are going gaga over large models and big data, there is still incredible value left to extract in small models and data, especially in robotics.
All the skills shown below were each trained with <1 min of human data and <20 min of online RL
https://t.co/IFipGATBnf 🧵👇