How do you perform interactive motion planning of multiple autonomous cars, one way is to use game theory. In this video, you can see my interactive game theory-based motion planner for wheel-to-wheel racing.
@ETH_en#AutonomousVehicles#wheeltowheel#racing
Hiring: Student Researcher @ Google Zurich! 🇨🇭
Looking for an EMEA-based PhD student to work on: Efficient 3DGS / Feedforward Models / 3D GenAI.
Start: June 2026 or earlier.
If interested, please reach out with your CV to: [email protected]
Gaussian Garments: Reconstructing Simulation-Ready Clothing with Photorealistic Appearance from Multi-View Video
Contribution quote from the paper:
In summary, our main contributions are
• a comprehensive pipeline for reconstructing the shape,
appearance, and behavior of real-world garments using
Gaussian splatting,
• an algorithm for registering garment meshes to multi-
view videos with an optimization procedure based on
Gaussian splatting, and
• a Gaussian Garment representation that combines triangle meshes with Gaussian textures to capture photorealistic appearance and can be used as a fully controllable 3D asset.
TextMesh got accepted at 3DV! In Christina's internship project, we combine Dreamfusion with a SDF representation, and propose a novel multi-view consistent texture finetuning step leading to high-quality text-to-textured mesh results. Checkout: https://t.co/sBHcghPbxr
Do you care about safety and sample efficiency in RL algorithms, if so check out our #IROS2023 paper “A Multiplicative Value Function for Safe and Efficient Reinforcement Learning” Homepage: https://t.co/CWZGdiixeX
Arxiv: https://t.co/Lbr0NjXTTj
GitHub: https://t.co/sSdgwpd3yP
I added automatic differentiation which allows for fast integration of new models and now the code can handle variable left-right track boundaries and all can be tested easily in a docker container
My first paper "Optimization-based autonomous racing of 1:43 scale RC cars" reached a nice milestone! The paper has now over 500 citations and the GitHub https://t.co/y9cdEgUgAl has over 1k stars and new features are coming #autonomousracing#autonomousdriving
The recordings of all the talks of the Workshop on Autonomous Driving at #CVPR2023 are now online
Workshop homepage: https://t.co/jUTnoNkfUy
YouTube playlist: https://t.co/ObekAGkTUU
@AwokeKnowing@rsasaki0109 The method assumes that the race track is known, as well as the position of the other cars. For our real setup we used an overhead camera system. But I also worked on the problem for the case where only the "visible" track is known
TextMesh: Generation of Realistic 3D Meshes From Text Prompts
extend NeRF to employ an SDF backbone, leading to improved 3D mesh extraction. In addition, propose a novel way to finetune the mesh texture, removing the effect of high saturation and improving the details of the output 3D mesh
abs: https://t.co/XGho2QzUZw
Argoverse is hosting 4 competitions this spring:
Multi-agent Motion Forecasting https://t.co/5dJrVSt7S1
Unified Detection, Tracking, Forecasting https://t.co/HRUVlUnqmp
Scene Flow https://t.co/y5i7WpjljR
3D Occupancy forecasting https://t.co/LXTTzZmXNY
Please take a look!
Check out our #ICCV2021 paper “Structured Bird's-Eye-View Traffic Scene Understanding from Onboard Images” where we extract local road network in form of lane graph and object instances in bird’s-eye-view; from a single onboard camera image.
https://t.co/8Yo5FyvdmU
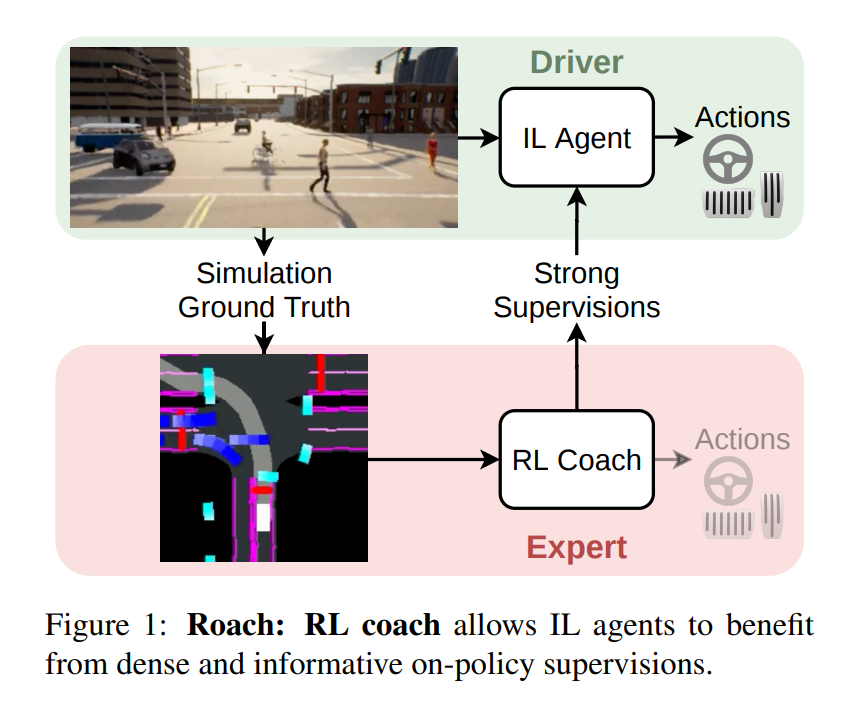
"End-to-End Urban Driving by Imitating a Reinforcement Learning Coach"
@DrFisherYu & Luc Van Gool's team @CVL_ETH#iccv2021 paper
abs: https://t.co/QkZcw8Fx3b
pdf: https://t.co/g0t8iQXksV
In 2019, we released nuScenes, the first publicly available dataset of its kind, to further advancement of safe autonomous vehicles. Today, we continue our commitment to safety-focused data sharing with nuPlan: the world's first benchmark for AV planning: https://t.co/OfHLHUOwVm
We are hosting Workshop on Autonomous Driving again this year @CVPR 2021. It features a list of amazing speakers as well as challenges on Waymo Open Dataset and Argoverse! Happening on June 20! https://t.co/OWS9hfCehm
Join our Workshop on Autonomous Driving tomorrow (20 June) @CVPR 2021. We have a list of great speakers and challenges by @Waymo and @argoai. https://t.co/OZPSCVgAWD #autonomousdriving