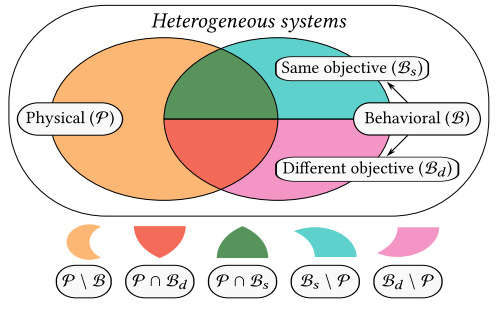
Our new paper crystallizes the role of heterogeneity in multi-agent reinforcement learning. We provide a new algorithm, and show that multi-robot systems with heterogeneous controllers boast higher resilience to observation noise:
https://t.co/CFLpKf4Spb
It was such a pleasure to visit Imperial again, thanks to @Ed__Johns for being a fabulous host, and thanks to the Imperial students for the vibrant Q&A after the session!
It was my pleasure to host Amanda Prorok (@aprorok) last week, to hear her talk about how graph neural networks can learn intriguing, collaborative behaviours for multi-robot systems!
You can watch a recording of her talk here: https://t.co/eyZW63SYl5. Enjoy!
After a fruitful search for a faculty position in Machine Learning + Robotics, happy to share that I am joining the University of Cambridge.
Interested in working together? Reach out to connect!
(PhD applications due Dec 5th, MPhil - later in Spring)
https://t.co/RvT9CNjfSJ
Still a few days left to apply! If you're into robot learning, and like stuff that flies, check out our postdoc opportunity here at Cambridge:
https://t.co/ANYIFYASln
@Cambridge_CL
We're thinking about the benefits of diversity in multi-robot systems... Here's a cool movie that describes what heterogeneity can do for cooperative tasks:
https://t.co/pVsm06mCgE
#HeterogeneousMARL#Robotics#GraphNeuralNetworks
This week at #ICLR2023, we are presenting POPGym, a comprehensive collection of partially observable RL problems and baseline models. Using POPGym, we execute a comparison across RL memory models 👇
https://t.co/UPd2ISzIr7
https://t.co/s8bsIZNndO
Check out our upcoming workshop on Multi-Robot Learning at #ICRA23! We have a super exciting line-up of speakers. Send us your submissions to feature in our spotlight and poster sessions! Deadline approaching: April 15.
https://t.co/RIRVqmeh93
@cjdamato@angelaschoellig
At @Cambridge_CL's Prorok Lab, @aprorok and her team are working on finding practical methods to solve problems that require robots to coordinate with each other. #robotics#collectiveintelligence https://t.co/YwJZhvgCiC
We are hiring postdocs! A couple of keywords for the job: multi-agent systems, robots, GNNs, machine learning... If you're interested, apply here: https://t.co/Xc0YAaE2Mt
Too often, we focus on fixing the robot instead of the environment that it operates in. In this new paper, we do the latter, and show that subtle modifications to the robots’ surroundings make a real difference:
https://t.co/qZBEc7bOeW
Credit assignment among agents is really hard when you only get a global reward. In a new learning paradigm, agents use a #GNN to communicate key information that allocates appropriate credit, and promotes cooperative behavior:
https://t.co/lCHbVD8uEO
At #ICLR2022 we're presenting a new hybrid approach towards the TSP, that converges to optimal solutions, faster. Check it out: https://t.co/XLHcNbeJmF
🧩 The 'Travelling Salesperson Problem' is one of the oldest puzzles in computer science.
A new approach to solving it, developed at @Cambridge_CL, could improve efficiency in the transport and logistics sectors.
@AProrok#ICLR2022
https://t.co/SHK7SMTqug
Delighted to be one of Cambridge's 12 Pilkington Prize winners this year, recognizing outstanding teaching. Thanks to @Cambridge_CL for supporting my vision, and to a fabulous team of TAs for keeping the wheels turning!
https://t.co/JGmLFlQjqs