@jayinnn@mkturkcan@janusch_patas The paper mentions satelliteSfM and MoGe depth. Did you run these, and does the repo include them?
I’d love to try this on my own data, but I didn’t see any instructions for how to do that.
@UUUUUsher Really interesting work! I was wondering whether your bundle adjustment requires FP64 precision. In my experiments, BA was too unstable in FP32, but FP64 ran very slowly on consumer GPUs (e.g., GeForce - up to ~50× slower than FP32). Did you run into this issue?
@otri@jonstephens85 Have you tried video matting? This repo is pretty good: https://t.co/BpAoNgbgjQ. I’ve never tried it on 360 images, but if it does not work directly you can potentially warp the 360 to many pinhole images e.g. with this https://t.co/Tjv6WfMcPl.
🔧Also, check out our library nvTorchCam, built for seamless PyTorch workflows across pinhole, fisheye, ERP, and other camera models.
💻 https://t.co/Tjv6WfMcPl
🎉 Congrats on DAC and the CVPR’25 acceptance!
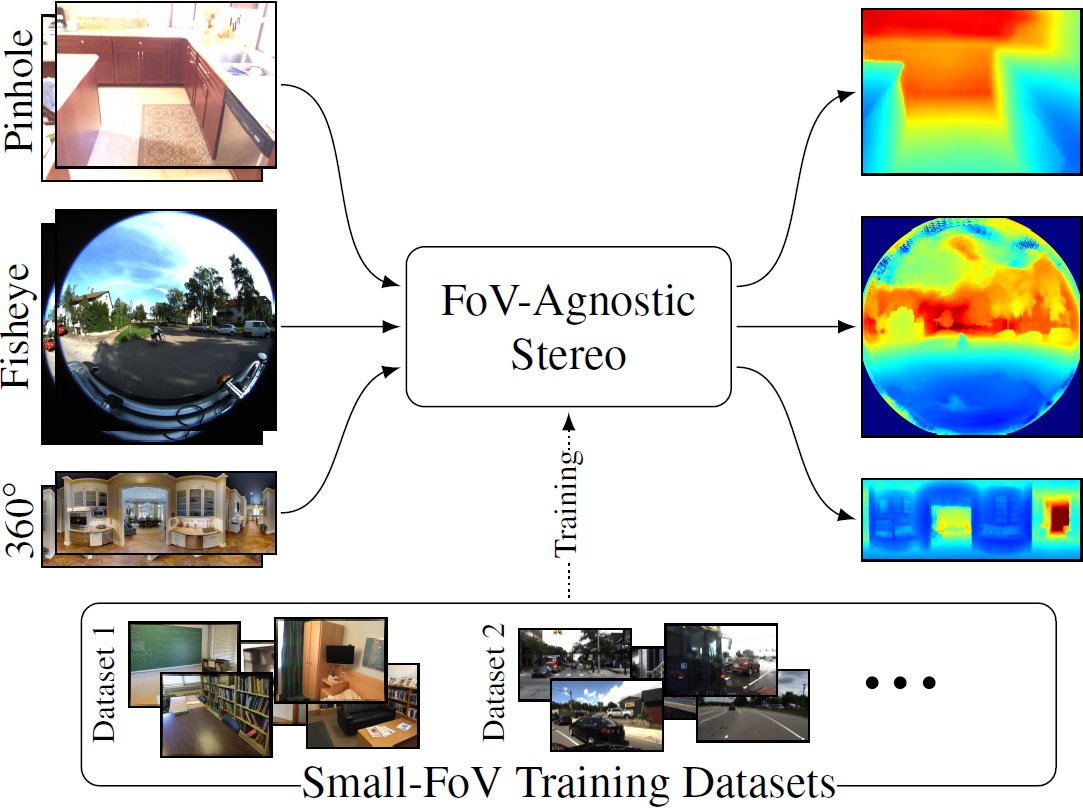
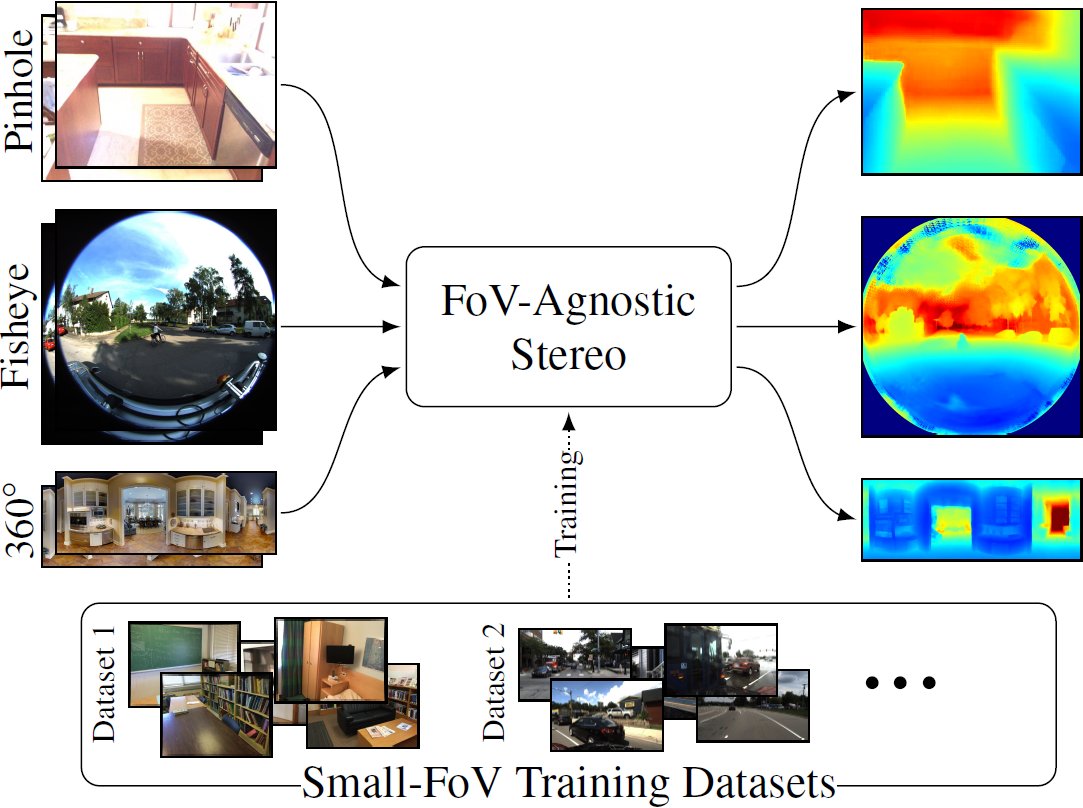
We explored a similar idea for stereo in FoVA-Depth (3DV’24 oral):
📌 Warp pinhole to canonical ERP to generalize across camera models.
Glad to see this working in monocular too!
📄 Project: https://t.co/DE9NABGLrt
💻 Code: https://t.co/ybLjyllZgd
🧵 Original tweet: https://t.co/HKfLhLKcrK
#CVPR2025 #DepthEstimation #360Images
🎉 We’re excited to announce our paper Depth Any Camera (DAC), accepted to 𝗖𝗩𝗣𝗥 𝟮𝟬𝟮𝟱! 🚀
Along with this, we have a few exciting updates!
To support NeRF & Gaussian Splatting on fisheye inputs, we now provide DAC’s depth estimation results for #ZipNeRF on fisheye images.
📥 Download depth maps:
🔗 https://t.co/oMJNRv0c9Q
Methods like #SMERF, #FisheyeGS, & #EVER can leverage this fisheye depth prior!
#CVPR2025 #NeRF #GaussianSplatting #3DReconstruction #ComputerVision
@ducha_aiki@Rafael_L_Spring Yeah, I think that’s right. I wanted to try this, which maybe you posted about: https://t.co/Of7vtu2CRb. 900 stars and 25 forks is pretty good for an empty repo 😂
@ducha_aiki@Rafael_L_Spring I’ve found on some cross domain image matching (RGB/IR) you can improve Superpoint/Superglue significantly with histogram equalization or even just flipping the colors.
@AntonObukhov1@peter_wonka@yiyi_liao_ Interesting, but with such a small rotation angle, it’s tough to evaluate how well it works. Still a step up from a depth map that doesn’t show much.
🚀 Introducing ProJo4D — a new method for Inverse Physics estimation: recovering 3D shape and physical behavior of deformable objects.
It can simulate future motion and render novel views — all from sparse multi-view videos!
🔗 https://t.co/KYbq9VarPG
Exciting update! 🎉
🔑 By popular demand, nvTorchCam is now under the Apache License 2.0.
🛠️ Get the code: https://t.co/2z3xqJEbCH
📄 Check out the arXiv article: https://t.co/UeiUjOkb7T
🎥 Demo video below:
Big thanks to @zhenjun_zhao for spreading the word! 🙌 #opensource#AI #python #arxiv
🎉 Thrilled to introduce nvTorchCam, our new #PyTorch library designed to support the development of models using camera geometry like plane-sweep volumes (PSV) and related concepts like sphere-sweep volumes or epipolar attention, in a camera model-agnostic way! 🚀
🔗 Code: https://t.co/2z3xqJDDN9
(1/6)
@jon_barron Agreed. I’d did this in my Shape and Material at Home paper https://t.co/rj4OhWOgH2. @tomgoldsteincs ‘s group did something similar in this paper https://t.co/IpO8pcYqzb.
Proud of this project led by @daniel_lichy. FoVA-Depth is our answer to a problem we experience in many projects: for uncommon cameras, eg fisheye, we don't have as much training depth data as we do for pinhole cameras.