90% the tube parts we laser cut are simple cut to length with a few holes.
This technology is extremely unexplored and while this is an extreme example I think more engineers need tube laser tech in their toolbox.
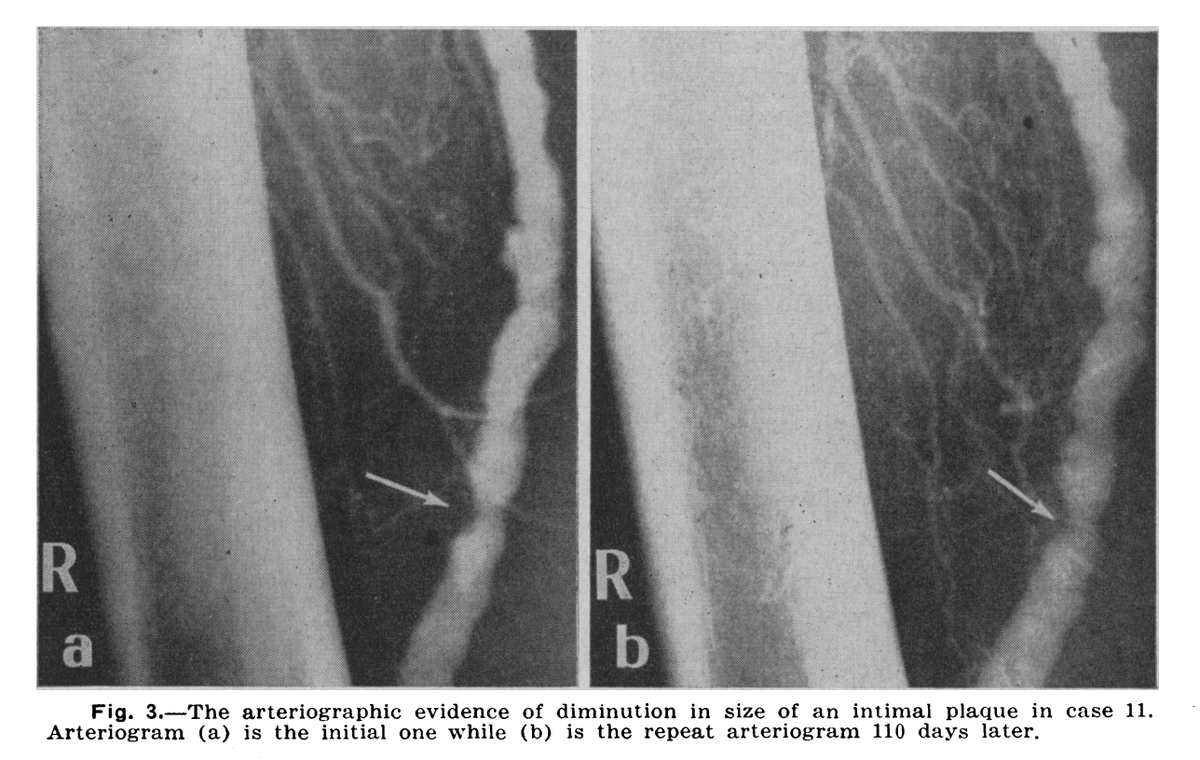
Vitamin C shrinks arterial plaques in clinical trial.
The picture below shows improvements in under 4 months.
500 mg 3 times daily in people with heart disease - 6/10 people had reduced plaques, while none in control did.
Vitamin C has several cardioprotective effects:
➞ Antioxidant
➞ Anti-inflammatory
➞ Collagen supporting
➞ Cholesterol lowering
1954. The old forgotten studies often have the best gems.
@dela3499 Sometimes great writing rings so false that it makes you think more about your perspective and want to argue - there is value in that as well.
In the U.S., you can fly an ultralight vehicle without a pilot's license, registration, or medical certificate, provided it meets strict FAA Part 103 regulations. These, often single-seat, "vehicles" must weigh under 254 lbs empty, have a maximum 5-gallon fuel capacity, and a top speed below 55 knots (63 mph).
we ACTUALLY got the oppressor mk2 before GTA 6.
Polish engineer Tomasz Patan built the Volonaut Airbike.
it hits 124 mph, runs on jet propulsion, has no propellers, and weighs less than your dog.
pretty fucking sick.
Chinese researchers have developed the best shortest-path algorithm in 41 years!
Dijkstra’s Algorithm has been the undefeated king of the shortest path for over 40 years.
Whether you’re using Google Maps, booking a flight, or routing internet packets, Dijkstra is the engine running in the background.
Since 1984, textbooks have taught that its efficiency was hit by a "sorting barrier."
To find the shortest path, you have to sort the points by distance. And sorting has a mathematical floor you can’t cross.
Until now.
A research team from Tsinghua University just published a paper that shatters the 41-year-old record.
They proved that Dijkstra is not optimal.
By combining the logic of the Bellman-Ford algorithm with a revolutionary "recursive partial ordering" method, they figured out how to find the path without fully sorting the nodes.
The results are a massive shift in theoretical computer science:
- The first deterministic improvement to the Single-Source Shortest Path (SSSP) problem since 1984.
- A new time complexity of $ O(m \log^{2/3} n)$, officially beating the long-standing $ O(m + n \log n)$ limit.
- On massive sparse graphs (like the web or global logistics), this means finding the best route significantly faster than previously thought possible.
For four decades, the greatest minds in algorithms believed this limit was absolute.
Last year, even the legendary Robert Tarjan won an award proving Dijkstra was "optimally efficient" at sorting distances.
Tsinghua’s answer? Stop sorting.
The world’s most settled problem is suddenly wide open again.
If we can break a 40-year-old law in basic graph theory, what other "impossible" speed limits are waiting to be crushed?
Weekend art project. Copic marker filling space with a Hilbert curve on a hand built plotter. 2 steppers & a couple of linear rails. The sound the motors make is awesome. Posting incremental / weekend projects as they come.
Embeddings power every modern LLM. But what do they actually learn?
This Berkeley (BAIR) paper is one of the clearest reads on how AI systems learn and why embeddings really work.
https://t.co/qj10TMZjnp
Continual Learning remains one of the most challenging “holy grails” of AI.
Most discussions focus on catastrophic forgetting: models lose what they previously learned. But there is another equally important failure mode: over long continual training, neural networks can also lose their plasticity, ie, their ability to learn new things is weakened over time.
In our ICLR 2026 work with colleagues at @Apple and @ETH, we study this phenomenon, known as Loss of Plasticity (LoP), from a geometric perspective.
We show that LoP can arise when gradient dynamics become trapped in invariant manifolds of parameter space. In particular, we analyze two types of traps:
🔴 Frozen units: units saturate, gradients vanish, and they become effectively silent to backpropagation.
🔵 Cloned units: units become redundant, receive matching forward and backward signals, and move together.
For these structures, the gradient is tangent to the trap. Once standard GD/SGD enters these affine subspaces, it cannot leave them on its own. This means the dynamics can remain sticky even when the data distribution or task changes.
What we find especially interesting is that these traps are not merely optimization bugs. The same feature-learning pressures that help networks learn useful representations for the current task can also push them toward states with less future adaptability.
This raises a difficult open question for future work: are neural networks trained with SGD and cross-entropy loss fundamentally the right framework for continual learning?
Please read the full paper for more details: https://t.co/oPFIebhDUL
Open-source magnetic tactile sensor for $5! 🧲
Researchers introduced a magnetic tactile sensor that's low-cost, and easy to fabricate, democratizing tactile sensing for robotics.
Operating in unstructured environments like homes and offices requires robots to sense forces during physical interaction. Yet the lack of a versatile, accessible tactile sensor has led to fragmented solutions and often force-unaware, sensorless approaches.
Building an eFlesh sensor requires four components: a hobbyist 3D printer, off-the-shelf magnets (less than $5), a CAD model, and a magnetometer circuit board.
The sensor is 3D printed with magnets embedded in the middle layer. Based on chosen mechanical properties, magnets displace in response to contact forces, measured by a magnetometer underneath.
An open-source design tool converts simple OBJ/STL files into 3D-printable STLs. This enables application-specific sensors for robot hands, grippers, quadruped feet, and more.
Slip detection generalizes to unseen objects with 95% accuracy. Visual-tactile control policies improve manipulation by 40% over vision-only baselines, achieving 90% success on precise tasks like plug insertion and credit card swiping.
All design files, code, trained models, and conversion tools are openly available.
Project page: https://t.co/gTHpcnja5B
~~
♻️ Join the weekly robotics newsletter, and never miss any news → https://t.co/GoA3ZuwoPB
RoPE is proof that sometimes the right mathematical abstraction can solve an engineering problem more elegantly than any learned parameter can.
No training needed. No lookup tables. Just rotation matrices and the dot product takes care of the rest.
You can make your own silicon with https://t.co/zIPAlPr7Qm too! Our second shuttle run is open at https://t.co/8QhIryRvFP with a new $4 USD per die option!
https://t.co/ogfC0Qv6T7
You can also use sunglasses to "see" the strain in a transparent material like ice. There was a cool Exploratorium exhibit that had a cold plate where you could watch the ice crystals grow in real time / where the strain and boundaries were in the crystals.