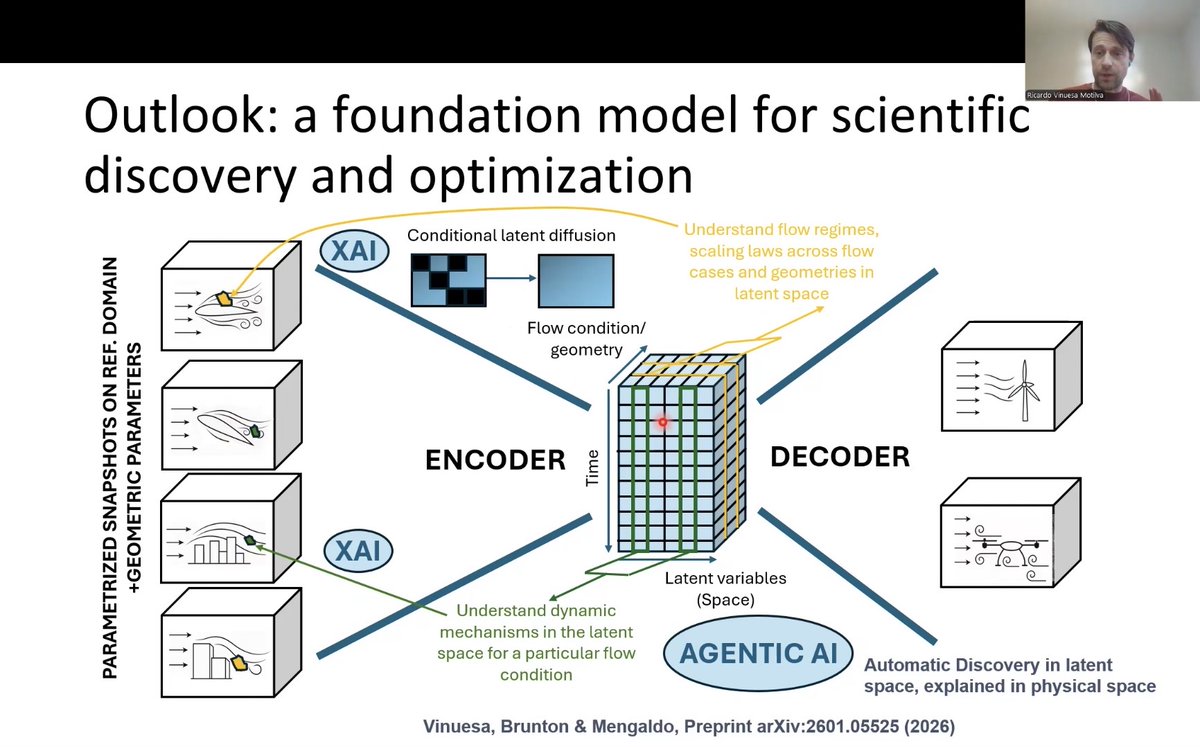
Thrilled to share our work on foundation models+agentic AI for fluid mechanics! Our autonomous system selects the cases to analyze, generates the data and extracts the key flow metrics. The agreement with high-fidelity simulations is excellent.https://t.co/G8RD4RQ1qV #AI4science
New paper out!!
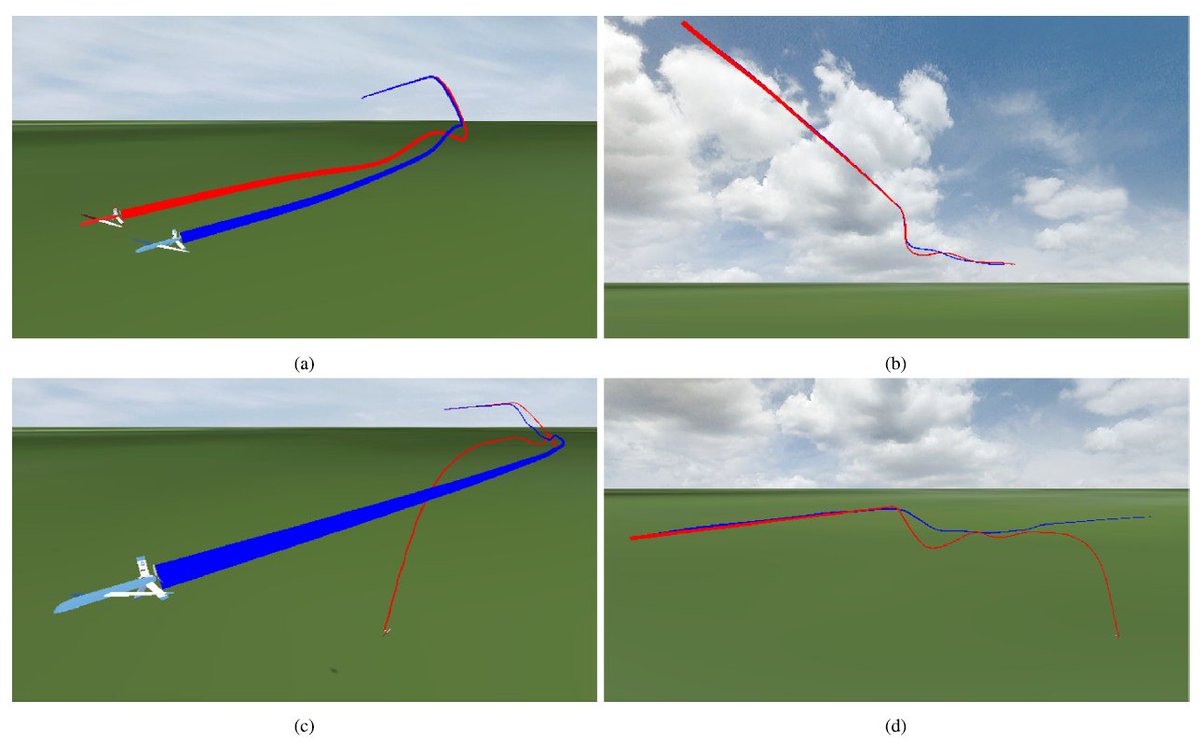
We develop a transformer-based reinforcement learning controller for fault-tolerant control of fixed-wing UAVs.
The controller adapts to structural damage or actuator failures, enabling resilient autonomous flight under severe conditions.
New paper out! 🚀
We propose a transformer-based fault-tolerant controller for fixed-wing UAVs trained with offline reinforcement learning! It adapts to actuator failures and structural damage
https://t.co/ocbWprjSIJ
#AI#ReinforcementLearning#Transformers#UAV#Control
New video!! We describe our ideas and strategies to build #foundation#models integrating #agentic#AI systems! The goal: autonomous and automatic discovery, design and optimization!!
This is on-going work with many collaborators. Stay tuned!!
https://t.co/vW78OGGck4
Lately I’ve been working on a side project: a reimplementation of the original GenCast model codebase, DeepMind’s diffusion-based medium-range weather forecasting model, using the “new” Flax API called NNX.
PINA has joined the PyTorch Ecosystem, bringing a unified framework for Scientific Machine Learning to researchers and engineers.
PINA is an open source Python library built on PyTorch, PyTorch Lightning, and compatible with PyTorch Geometric. It streamlines SciML workflows for modelling physical systems, solving PDEs, building machine learning force fields, simulating dynamics, and more. Its modular structure spans problem definition, model design, solver selection, and training, offering both flexibility and reproducibility.
🔗 Learn more and explore how to get involved: https://t.co/IHgoqDXAD4
#PyTorch #OpenSourceAI #SciML #MachineLearning
The hardware used was:
- IMU MPU6050 (~ 3$)
- Arduino (~ 15$)
- Motor + ESC (~ 25-30$)
Communication with the pc was handled through serial port.
StableBaselines3 from @araffin2 was used for RL training.
Github repo:
https://t.co/NRbO1CQ6JS
A few months ago I was working on this toy project. I wanted to try training a RL agent directly on real hardware (on a real cheap one), and I was looking for a safe, non-easily breakable setup to do that. This ended up with a really simple but quite didactic "bicopter".
SAC or TQC learned to solve the task (to follow the setpoint angle) in only 30k steps, which could take 10-25 minutes on a CPU-only machine. Observations were taken only from the IMU. Hand tracking is a nice touch added to control after training.
@franciscuto Hola Francisco! Te importaría que te mandase un mail a tu correo de DeepMind para hacerte algunas preguntas académicas? Perdona las molestias 😄