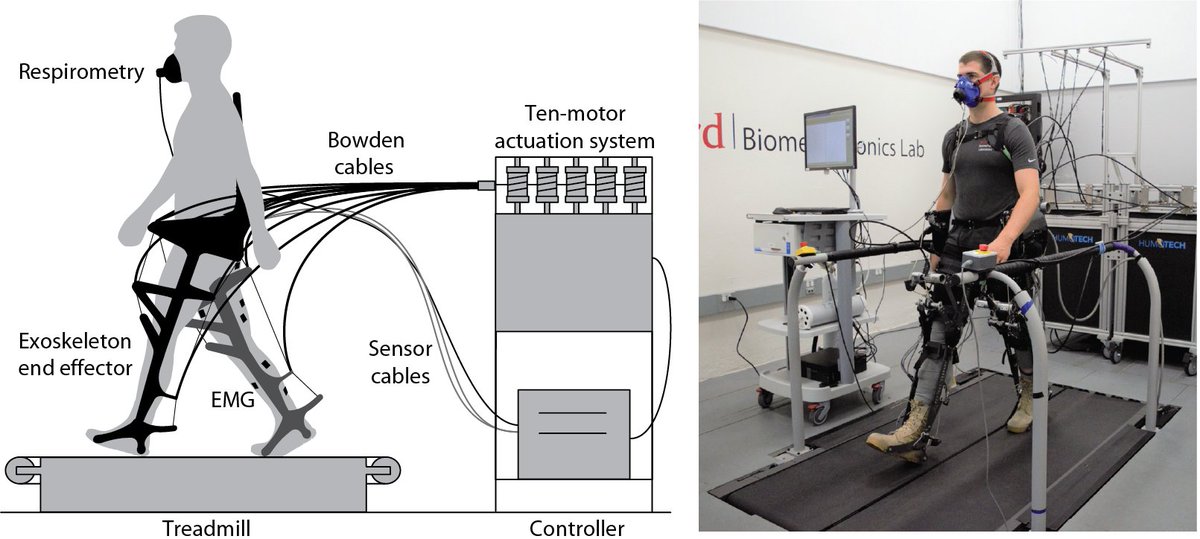
#OpenAccess paper in Wearable Technologies @CUP_SciEng! "Comparing optimized exoskeleton assistance of the hip, knee, and ankle in single and multi-joint configurations." https://t.co/i07Q45Bh4R
Whole-leg assistance reduces metabolic cost of walking by 50% relative to unassisted
Thank you NSDREC for funding this project and advising on the experimental setup! And thank you, coauthors! @p_franks_, @SeungmoonS, Ricardo Reyes, Meghan O’Donovan, Karen Gregorczyk, and @StevenHCollins 6/6
Check out our recent study in JNER where we optimized whole-leg exoskeleton assistance with worn loads. https://t.co/xiPju8Nb1g
Metabolic reductions were similar with all worn loads, and there was not a clear trend in optimized torque profiles. 1/7
Exos assistance had a similar impact for all tested worn loads, but torque trends with worn load were unclear across participants and load conditions. Exo assistance may be effective due to customization to the user, or there may be a range of effective torque profiles. 5/6
Thank you NSDREC for funding this project and advising on the experimental setup! And thank you, coauthors! @p_franks_ , @SeungmoonS, @asvoloshina, Ricardo Reyes, Meghan O’Donovan, Karen Gregorczyk, and @StevenHCollins
7/7
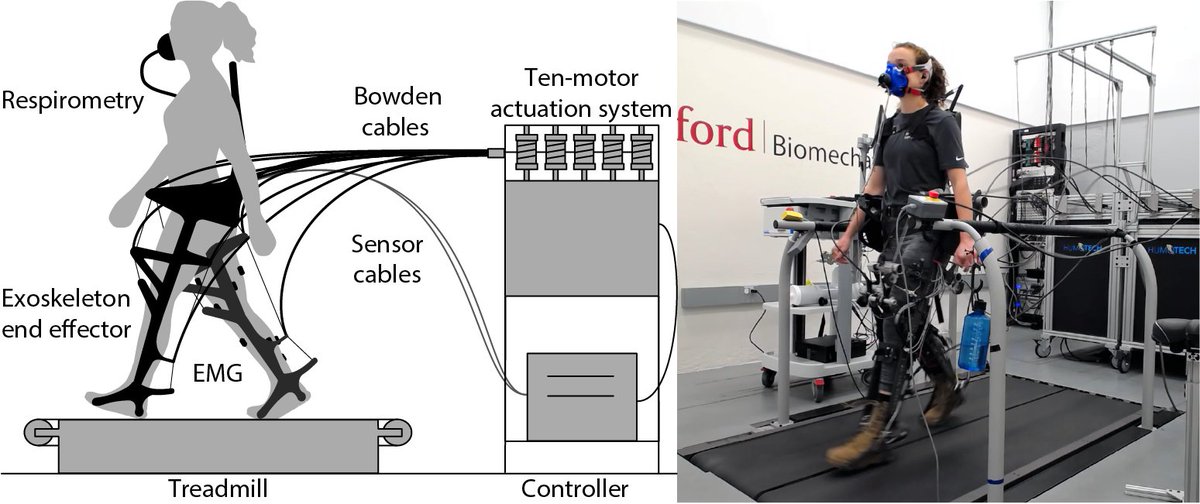
Our recent study in JNER optimized whole-leg exoskeleton assistance at a range of walking speeds. https://t.co/9WUPqSq5gf
Are benefits from exo assistance speed dependent? Yes!
Does optimized exoskeleton assistance change with walking speed? Not as clearly as you would think. 1/7
Exoskeleton assistance is effective at all tested walking speeds with greater benefits at faster speeds. Hip and knee torque magnitude trends with speed are unclear, which makes me wonder, how sensitive are we to exo torque magnitude? 6/7
How much do human adaptation and device customization contribute to exoskeleton performance?
A lot!
With @StevenHCollins in @SciRobotics: https://t.co/HXRcWY3xQP
Thread 1/8
The robotics team has been working on legged robots for the past 17 years, placing 2nd in the DARPA Robotics Challenge, providing support for the NASA Space Robotics Challenge, developing exos, being a finalist in the Toyota Mobility Foundation’s Mobility Unlimited Challenge.
We're hiring! We're looking for control and software engineers for exoskeletons and humanoid robots at the Institute for Human and Machine Cognition in Pensacola, FL.
https://t.co/TKnubvGzSs
https://t.co/vLbKdhAAUE
https://t.co/n4wb8NhjO6
We've developed exos for the past 12 years and placed 2nd and 4th in the 2016 and 2020 Cybathalon. In addition to exos for people with spinal cord injury like the device below, we are working on augmentive exos for able-bodied individuals
https://t.co/TKnubvGzSs