Biomechanics at X. I build, control, and optimize wearable robots. Former @StevenHCollins lab member. Voted by my coworkers "most likely to wear denim on denim"
I'm recruiting PhD students for Fall 2023; If you are interested in either advanced mechatronic design or machine learning-based control of assistive devices, please reach out! Examples of past projects on my lab site: https://t.co/TkbkDEMJ1M
We’re looking forward to a great lineup of talks, panels, and posters tomorrow at #ICRA2022! Don’t miss our workshop on Online Machine Learning-Based Control of Lower Limb Exoskeletons.
More info: https://t.co/2yISsmqvfT
Applications are now open for the X Scholarship Program! This scholarship will provide 3 years of funding for an incoming EPIC Lab PhD student to work on #WearableRobotics and #AI in collaboration with @Theteamatx (formerly known as Google X).
More info: https://t.co/tQ37zkFEOG
Our recent study, "Coupled exoskeleton assistance simplifies control and maintains metabolic benefits: a simulation study", has now been published via PLOS ONE!
Full text here: https://t.co/xc6b2cnt0H
A physicist, biomedical engineer, soft-goods prototyper and skateboarder walk into a lab — and they're all roboticists. On #WomensEqualityDay, X's @KatZealand shared why we need more diverse perspectives in robotics to build a future that includes everyone https://t.co/9ZUOUF0VpF
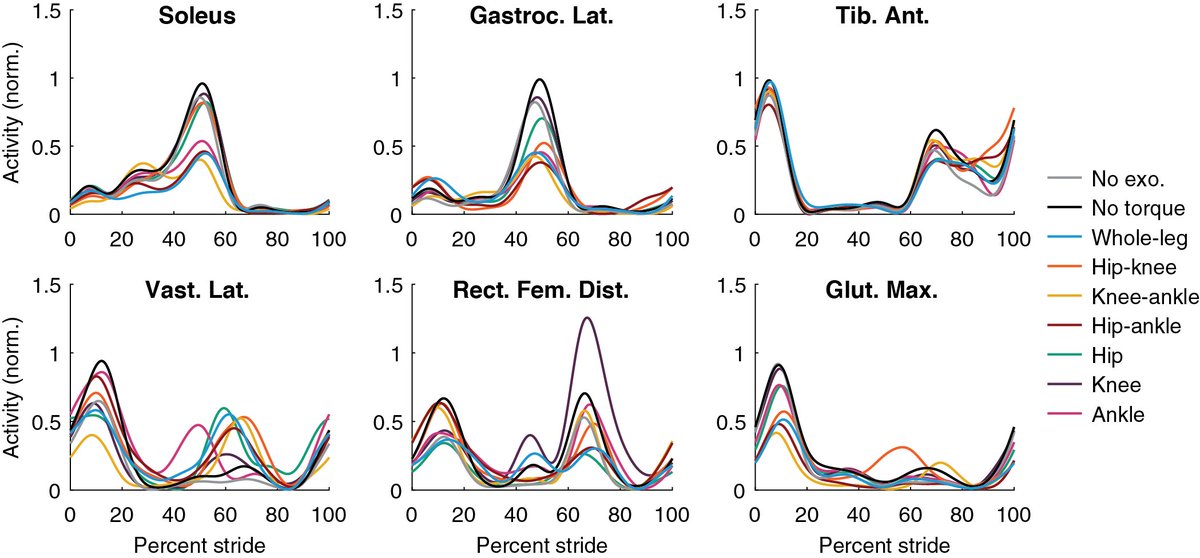
Changes in kinematics and muscle activity indicate that single-joint assistance indirectly assisted muscles at other joints, such that the improvement from whole-leg assistance was smaller than the sum of its single-joint parts.
#OpenAccess paper in Wearable Technologies @CUP_SciEng! "Comparing optimized exoskeleton assistance of the hip, knee, and ankle in single and multi-joint configurations." https://t.co/i07Q45Bh4R
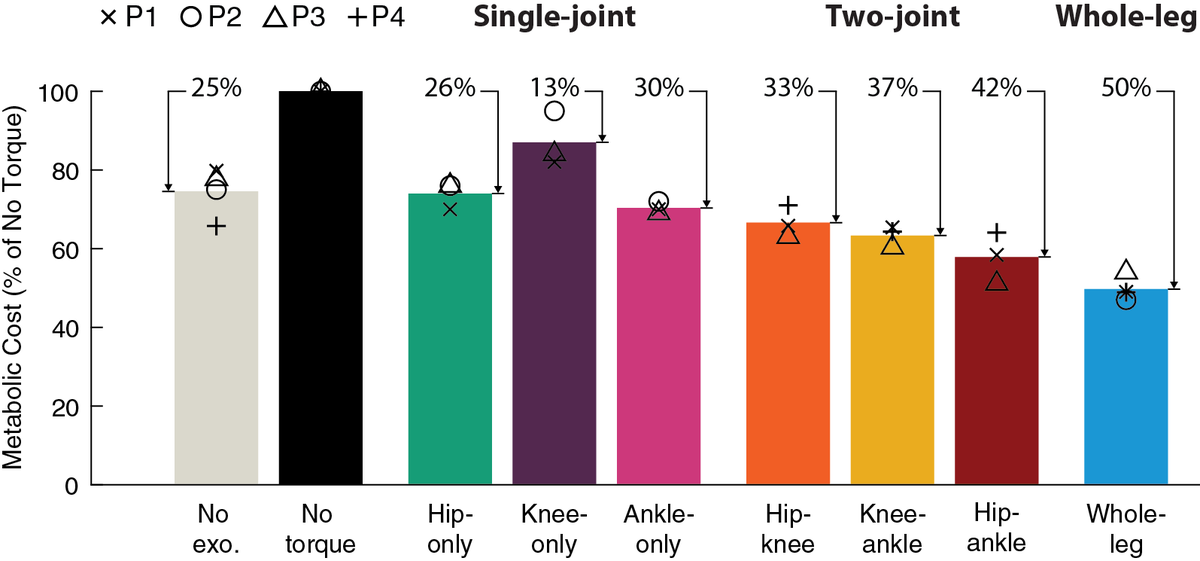
Whole-leg assistance reduces metabolic cost of walking by 50% relative to unassisted
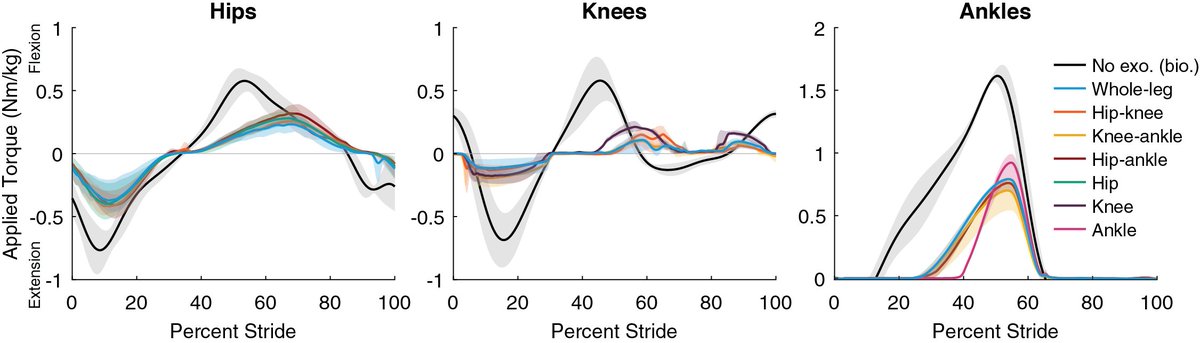
Two-joint assistance reduced the cost of walking by between 33 and 42%, with the largest from hip-ankle assistance (N = 3). Optimized torque profiles differed between single- and multi-joint assistance. Good starting points for designing controllers for mobile exoskeletons.
Hip-only and ankle-only assistance reduced the metabolic cost of walking by 26 and 30% relative to walking in the device unassisted, confirming both joints are good targets for assistance (N = 3). Knee-only assistance reduced cost of walking by 13% (N = 3).
I'm looking to bring on PhD and Master's students for Fall 2022 (or earlier). If you are interested in developing assistive robotics for people with mobility impairments, please reach out! Examples of past projects on my site: https://t.co/J9zF1yxLkV
@inseungkang@dawit_lee@dongho__park@GT_EPIC_Lab@MEGeorgiaTech@GTrobotics@ScottUhlrich Multi-channel as in the sum of multiple EMG signals, each from a different muscle? That sounds like a good strategy, maybe with weights from PCSA. Problem could be underestimating passive muscle forces from lengthening. Might need an offline OpenSim model to inform.