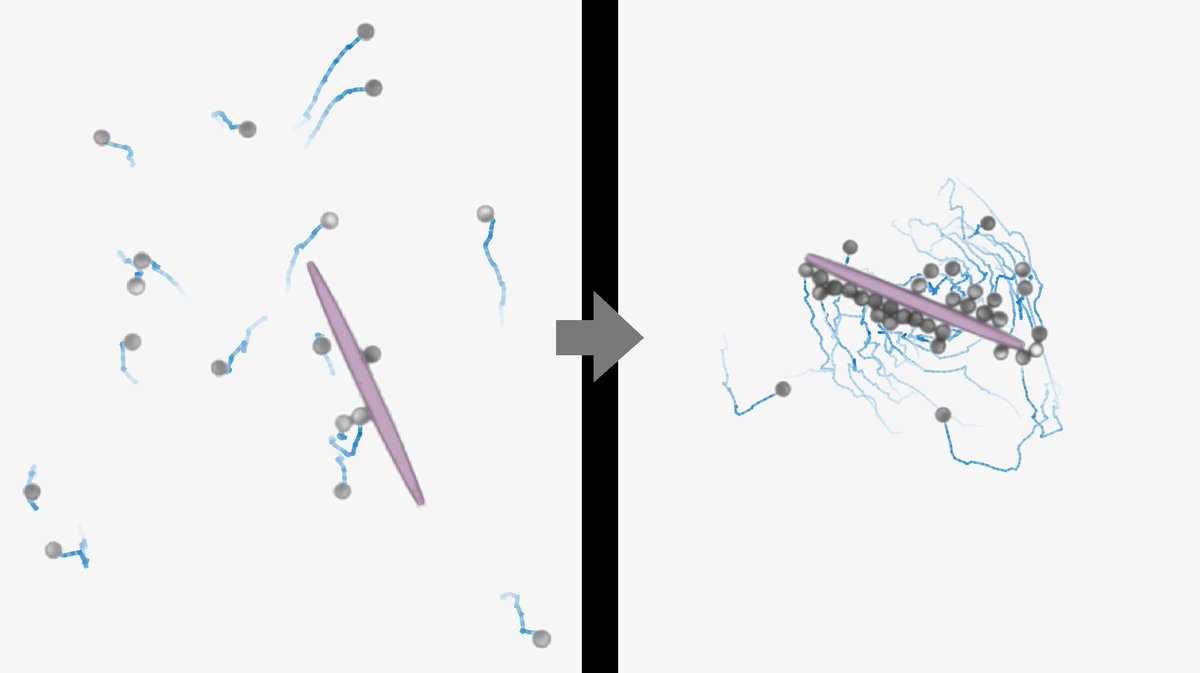
Scientistshave developed an #AI-based control strategy that enables individual laser-driven #microrobots within a swarm to cooperate, like ants or termites, to manipulate objects. @UniKonstanz@CBehav
Learn more in Science #Robotics: https://t.co/IzGoHNZ4o1
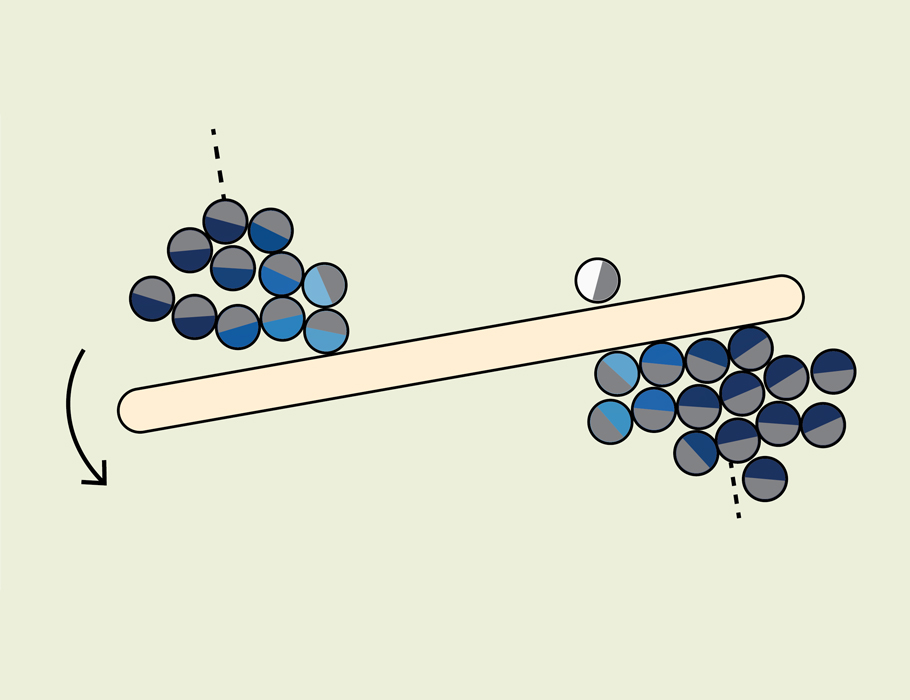
How can a team optimally mobilize its forces? A new study led by Veit-Lorenz Heuthe and Clemens Bechinger @UniKonstanz offers a clever solution - demonstrated with a swarm of microrobots! https://t.co/NY0HrYz83t
Read the full study here: https://t.co/DTO6qgd8o9
How can agents with simple bio-inspired brains make decisions together? This is what we simulate in our new arXiv preprint: “Collective decision making by embodied neural agents”
Congratulations @Alberto_Doimo on becoming an Acoustic & Sound Engineer from @polimi, with a wonderful thesis project on the design and implementation of the Ro-Bat, a bat-inspired robot 🦇 🤖 conducted at @CBehav@UniKonstanz
We look forward to continuing working with you!
Thanks, @SalahTalamali, for visiting @CBehav of @UniKonstanz and presenting your cool research on sound wave manipulation, an interesting technology that could improve our animal experiments with prey levitation and invisible touch.
We are much looking forward to today's @CBehav Seminar Series: @SalahTalamali from the University of Sheffield, UK, speaks about Creating Magical Experiences: Sound Wave Manipulation for Touch Sensation and Object Levitation. https://t.co/MyuMLzjs8k
@UniKonstanz@MPI_animalbehav
Our recent paper featured in Advanced Science News!
Happy to comment on our motivations for investigating the automatic design of #robot#swarms and on the challenges of realizing robot swarms while considering multiple design criteria.
📰 🤖🤖🤖
Thanks for the interview!
The new Zukunftskolleg Annual Report 2024 is out!
Again as a digital edition (https://t.co/7vnhWKbnoM), accompanied by an ingenious leaflet and – if you wish – you can also order a printed pdf version by sending an email to [email protected]. Enjoy reading!
Meet the EMERGE Team: David Garzón Ramos is a Research Associate at @BristolUni. His research is at the intersection of artificial intelligence, collective intelligence, and robotics.
New research in Science #Robotics describes a #SelfOrganizing approach that enables #swarms comprising wheeled robots and drones to coordinate decision-making for simulated search and rescue missions. @IRIDIA_ULB@ULBruxelles
https://t.co/4Un1puHMZA
Check out this great work from @IRIDIA_ULB. I have seen this work evolve from its beginnings and I'm happy to see it finally being published. Amazing work by all the authors and in particular @ZhuWeixuHarry, @sinannoguzz and @mktheinrich!
For more details, please check out our paper! https://t.co/1FSpTyXRx5
Thank you (for over 5 years of work!) to my co-first authors @ZhuWeixuHarry @sinannoguzz, senior author Marco Dorigo, and all co-authors @allsey87@w9hby@anderslyhne@EmanueleGarone
/5
Our paper
Self-organizing Nervous Systems (SoNS) for Robot Swarms
was published in @SciRobotics yesterday!
https://t.co/1FSpTyXRx5
Using SoNS, entire robot swarms can be programmed as if they were single robots with reconfigurable morphologies.
1/
Happy times at the excellent @DARSSymposium in New York this week! Congratulations to Simon Jones for his exciting work on Distributed Spatial Awareness for Swarms, which won Best Paper Award! He's been working on this for a while, building on @AjdDavison's excellent work on GBP.
Designing robot swarms is part puzzle, part problem—and definitely a mess!
In this 5-min read, we characterize complexities of designing robot swarms and highlight research goals that are shaping the field.
https://t.co/uCoqo94CTe
🤖🧩
In ICRA@40 w/ @sabinehauert, @EIC_EMERGE