Huge thanks to @spaceandtech_ for featuring E-dongkit!
As a research member Spatial Intelligence and System Integration, I’m glad to see our progress being shared. Our team is dedicated to achieving Robust Field Autonomy for legged robots—ensuring they can navigate the most unpredictable, off-road environments with precision.
Building robots that can truly "see" and "act" in the wild is a massive challenge, but it's one we tackle with passion every day.
Stay tuned as we continue to push the boundaries of what legged robots can do!
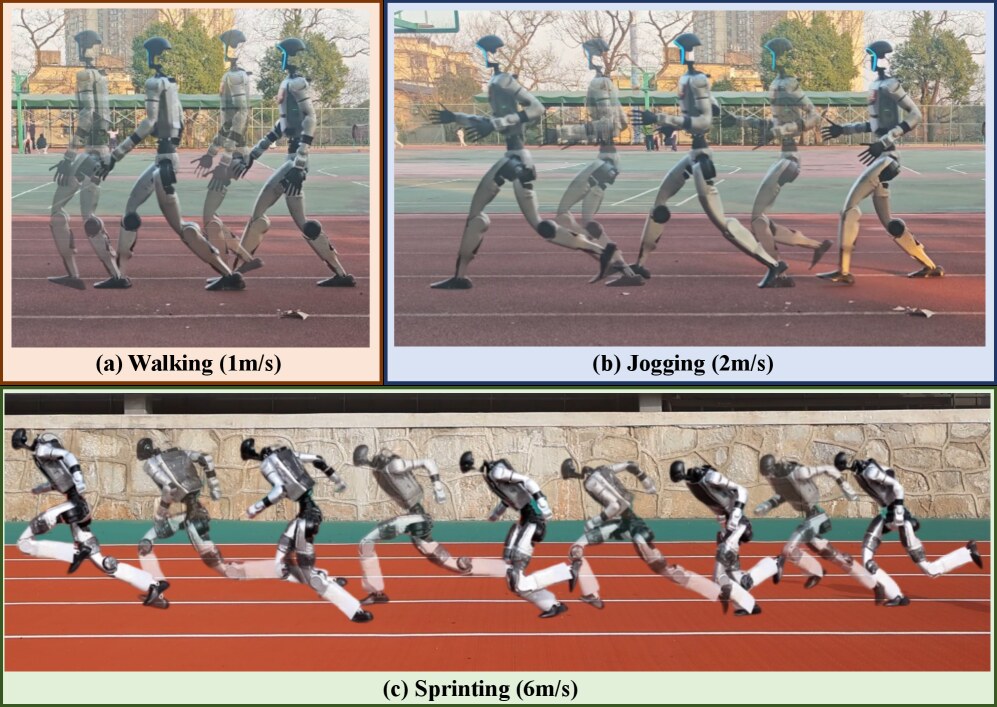
South Korea-based URobotics unveiled the E-Dong-Kit, a module for quick robot integration.
It enables advanced navigation and stable movement in real-world environments.
In demos, humanoid robots move smoothly and run alongside humans, showing practical, human-friendly mobility.
Nice new blog post by David Rosen on certifiable factor graph optimization in GTSAM: https://t.co/PwTOQASHBC
Together with the chordal SDP work I posted about recently, this should soon lead to some very cool new certifiable optimization features in GTSAM!!!
#ICRA2026 paper
"DroneKey++: A Size Prior-free Method and New Benchmark for Drone 3D Pose Estimation from Sequential Images"
@bini_und, Yeong-Jun Cho
abs: https://t.co/mkNptujSQn
https://t.co/531oWVobqF
In this work we explored how to repurpose terrain-aware human locomotion skills in a scalable and versatile way: like the action-free world model, we predict how humans will move online, and then let the humanoid track it with RL.
We talk a lot about how deep learning can enable new robot capabilities but a lot less about how we can use it to make robot capabilities more resilient and therefore make robots more deployable
Slide from an interesting talk by Prof Kostas Alexis in robots in the wild workshop at icra
At #ICRA2026, certifiable optimization is having a moment. Our workshop paper with Avinash Subramanian, Connor Holmes, Tim Barfoot & Frederike Dümbgen brings chordal sparsity + Bayes trees to globally optimal factor-graph estimation in GTSAM. Blog post and arxiv link in the replies.
We are arriving in ICRA, Vienna for presenting our Behavior Foundation Model for Humanoid Robots at Interactive Session 1 (Hall C), TuI1I.120, June 2nd.
Come and strike up a conversation on anything about humanoid robots and beyond~
Excited to present our work, “Tightly-Coupled Dynamic Object Tracking and RGB-D Inertial Odometry Estimation with Dual Quadrics,” at #ICRA2026!
Our method enables robust odometry in highly dynamic environments.
Thanks to my advisors @k_koide3, @MR2T_AIST and Prof. Jun Miura.























![OWW's tweet photo. Equivariant Filter for Radar-Inertial Odometry
Giulio Delama, Jan Michalczyk, Morten Nissov, Martin Scheiber, Alessandro Fornasier, Kostas Alexis, Stephan Weiss
https://t.co/7QPP3ak8hH [𝚌𝚜.𝚁𝙾] https://t.co/yR2Dso5OZR](https://pbs.twimg.com/media/HG93L5La4AApnE7.png)