Interested in simulated characters traversing complex terrains?
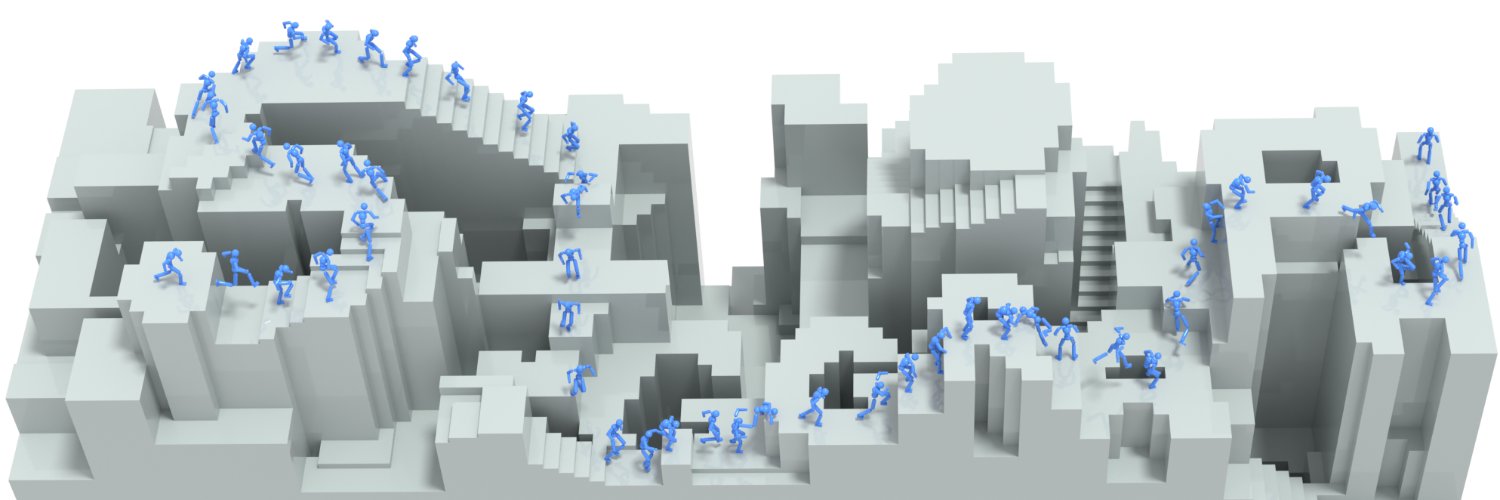
PARC: Physics-based Augmentation with Reinforcement Learning for Character Controllers
Project page: https://t.co/8lVkvDc5nX
with: @YiShi_333, @KangkangYin, and @xbpeng4@siggraph 2025 Conference Paper
1/
AGI without hands is just a ghost.
The brain gives absurd real-estate to hands, intelligence needs contact with reality
NEOs hands are fully capable accurate sense/act across force/pressure/shear/texture at human speed and strength
https://t.co/1N3GBbGj2C
How well can a model watch a short video of some physical dynamics and actually predict what happens next?
Introducing MPMWorlds: a new dataset and benchmark to evaluate how well models can reconstruct and extrapolate physical dynamics from video.
https://t.co/w6Yz8S5xBg
🧵👇
(1/n)
⛰️We try to push motion learning beyond what one can do on flat ground.
Kudos to Zewei Zhang @ctki49, Kehan Wen @KehanWen170077, and Michael Xu @mxu_cg, who made this a reality.
Check out now
https://t.co/ZmgNu1e72h
Excited to share our recent work on whole-body humanoid locomotion for challenging terrain traversal!
Diffusion-based planner + RL WBC = general purpose locomotion controller
Led by @ctki49@mxu_cg@KehanWen170077 at @leggedrobotics and @xbpeng4.
https://t.co/531oWVobqF
In this work we explored how to repurpose terrain-aware human locomotion skills in a scalable and versatile way: like the action-free world model, we predict how humans will move online, and then let the humanoid track it with RL.
The future of robotic foundation models relies on massive, diverse datasets. But how do you bridge the sim-to-real gap so robots can perform with human-like dexterity?
AnyTask and ExpertGen automate the entire simulation data pipeline, from language-guided task generation to robust policy distillation. Read our new blog post to learn more and see how we're scaling robotic data: https://t.co/VlbfB7ckgD
Introducing ✨RigidFormer: Learning Rigid Dynamics with Transformers - our attempt to scale learning-based physical dynamics with Transformers.
RigidFormer learns rigid dynamics with Transformers. It is a mesh-free, object-centric Transformer for multi-object rigid-body contact dynamics from point clouds.
Learning physics with purely neural simulators, without relying on traditional physics engines, is an important and widely studied problem. Prior SOTA methods often use graph neural networks for accuracy and generalization, but still struggle with efficient, high-fidelity simulation at scale.
RigidFormer uses only point inputs, matches or outperforms mesh-based baselines on standard benchmarks, runs much faster, generalizes across point resolutions and datasets, and scales to 200+ objects. We also show a preliminary extension to command-conditioned articulated bodies by treating body parts as interacting object-level components.
RigidFormer is mesh-free: it does not require mesh connectivity, SDFs, or vertex-level message passing, making it well-suited for point-cloud observations and scalable simulation.
This architecture can also be adapted to learn soft-body dynamics by replacing the rigid-body module (differentiable Kabsch alignment).
🎬See our video for more details.
Many thanks to my amazing collaborators: Minghao Guo @GuoMh14, Haixu Wu @Haixu_Wu_1998, Doug Roble, Tuur Stuyck @TuurStuyck, and Wojciech Matusik @wojmatusik.
Project page: https://t.co/6TBaRPVEYo
Paper: https://t.co/3OQUSJSND3
Excited to share that our work NeuralActuator: Neural Actuation Modeling for Robot Dynamics and External Force Perception has been accepted to #RSS2026!
Your robot — even a low-cost one — can feel external forces without torque or tactile sensors.
TL;DR: NeuralActuator is a neural actuator model that jointly predicts 1️⃣torque to capture the nonlinear and time-varying current–to–torque relationship of low-cost servos, 2️⃣external contact forces (and force detection gates) for sensorless force perception, 3️⃣and motor conditions that indicate each motor’s operating regime.
Here is a fast-forward video clip ⬇️ We are also covering more robots like LeRobot-S101 and Franka Panda.
More details coming soon.
Can we build a standalone, modular, and reusable naturalness reward for training motor controllers?
#SMP is a step toward that vision. Once SMP has been trained on a motion dataset, the priors can be reused to train new controllers to perform diverse tasks while adhering to the behaviors in the dataset, without original dataset or retraining.
🔥 Excited to share our latest work, SMP: Score-Matching Motion Priors, accepted to @siggraph
Webpage: https://t.co/Pz4yFAg1wo
Code: https://t.co/rZPp5b5GPD
Paper: https://t.co/K0z1oQkdFZ
Video: https://t.co/gPkyQCqNWz
We scaled off-policy RL to sim-to-real.
To our knowledge, FlashSAC is the fastest and most performant RL algorithm across IsaacLab, MuJoCo Playground, and many more, all with a single set of hyperparameters.
Project page: https://t.co/uaTcOoYtjt
Paper: https://t.co/PLu6ZGRKuB
1/
🚀 New paper out!
Task-Aware Actuator Parameter Allocation for Multibody Robots
We present a co-design framework that jointly optimizes actuator parameters and motion for humanoid robots.
📄 https://t.co/DHO9BrM70e
🔗 https://t.co/5sj6sV6GK7
Interlocking bricks aren’t just toys, they unlock an infinite space of creativity and a powerful foundation for physical and spatial intelligence.
💡 But how well do we truly understand what we build? What happens when these structures face real-world forces, for example robotic manipulation?
🚀 Introducing #BrickSim — the first physics-based simulator for interlocking brick assemblies.
#BrickSim reveals how forces propagate through complex builds, accurately simulating assembly, disassembly, and structural collapse in real time.
More than a simulator, #BrickSim is a unified virtual platform for robotics and Physical AI:
🤖 Seamless integration with diverse robotic systems
🧠 Develop and deploy intelligent control policies
🎮 Real-time teleoperation for interactive dexterous manipulation
🏟️ A unified platform for physical and spatial intelligence
🔧 Lowering the barrier to study contact-rich, ultra long-horizon tasks
🙌 Huge thanks to our amazing team! @yushijinhun, Weiyi Piao, Siyu Li, @ChangliuL@ICL_at_CMU@CMU_Robotics
🌐 Code: https://t.co/JvyNBPfCms
🌐 Paper: https://t.co/Lzl8kogpH0
#Robotics #Simulation #PhysicalAI #EmbodiedAI #Manipulation #Brick #Assembly
We have seen many works unlock the power of pretrained models for images and videos🏞️. But what about human motion🕺💃?
Can we leverage a pretrained motion prior for a wide range of downstream tasks?
Yes!! UMO is a simple yet effective framework that, for the first time, unlocks the priors of a motion foundation model (i.e., HY-Motion) for 10+ tasks, including editing, reaction generation, stylization, trajectory control, obstacle avoidance, keyframe infilling, and more. Amazing work! @xiaoyan_cong and @kunkun0w0.
🏠Webpage: https://t.co/AhRCOzPxhG
📄 Paper: https://t.co/x2Zt8faTum
With the growing number of tools for transferring SMPL motion to humanoids, we hope it could also become a source of skills for humanoid robot learning.
#Graphics #Motion #Animation #AIGC #GenerativeAI #Vision #3DV #Robotics #Robot #Humanoid #Learning #GenAI #Animation