My submission for the @huggingface Build Small Hackathon.
Project Halide is an open-weight diagnostic workbench for analog film scans. It uses MiniCPM-V 4.6 and Nemotron-Mini-4B-Instruct to identify physical film defects and generate practical inspection and remediation steps.
NVIDIA Metropolis Blueprint for video search and summarization (VSS) 3 is here.
Now your coding agent can analyze massive live streams and libraries of videos with a simple natural language prompt. Here's what's new:
- 16 new agent skills: Search, summarize, alert, report, review clips. All from natural language prompts.
- One unified open source repo: Source code, Docker and Helm deployment profiles for fast, easy deployment.
- Multi-video reports and Nemotron 3 Nano Omni: Insights across video and audio at scale.
- 3D multi-camera tracking: Production ready + #1 SOTA for smarter scene understanding.
Try VSS skills 👉 https://t.co/XvKJ0Kb8VV
One year ago today @Gradient_HQ publicly demonstrated Lattica for the first time.
Today it serves as the communication link between distributed swarms across the globe for training, inferencing and consistent movement
Introducing GLM-5.2: Frontier Intelligence, Open Weights
- Significant improvements in coding and agentic tasks
- Strong long-horizon capabilities with a 1M context window
- Two levels of reasoning effort: GLM-5.2 (max) pushes the limits, while GLM-5.2 (high) strikes a strong balance between performance and token efficiency
- MIT-licensed open weights
- Same API pricing as GLM-5.1
Tech Blog: https://t.co/LAsxUdN0JZ
Weights: https://t.co/g0A1C4UWx4
API: https://t.co/Kc3E22cbN7
Coding Plan: https://t.co/Nk8Y98HNhU
Chat: https://t.co/WCqWT0qCQb
📣 Introducing the Qwen-Robot Suite — Qwen-RobotNav, Qwen-RobotManip, Qwen-RobotWorld, three foundation models, a full stack for embodied intelligence.
🧭 Qwen-RobotNav — the gateway to mobility.
• Unifies 5 navigation tasks in one model: instruction following, point-goal, object-goal, target tracking, autonomous driving
• Controllable observation protocol
• Tool interface for agentic systems
🤖 Qwen-RobotManip — the foundation of interaction.
• Unified state-action space across heterogeneous robots
• Camera-frame delta poses for coherent cross-embodiment training
• Pretrained on a 38,100+ hour open-source corpus
🌍 Qwen-RobotWorld — infinite worlds for physical agents.
• Single world model, 20+ embodiments
• Natural-language action interface
• Predicts physically grounded futures across manipulation, driving, and navigation
Each model is independently useful, and could be composed as physical-world tools.Together, they form the low-level toolkit for general-purpose agentic systems that don't just see the world, but act in it.
📷 Blog:
https://t.co/ytLcbYET26
📖 Report:
Qwen-RobotNav: https://t.co/uPmSwDYGxg
Qwen-RobotManip: https://t.co/GeyIzJSpU8
Qwen-RobotWorld: https://t.co/SXPH1qzDFy
My submission for the @huggingface Build Small Hackathon.
Project Halide is an open-weight diagnostic workbench for analog film scans. It uses MiniCPM-V 4.6 and Nemotron-Mini-4B-Instruct to identify physical film defects and generate practical inspection and remediation steps.
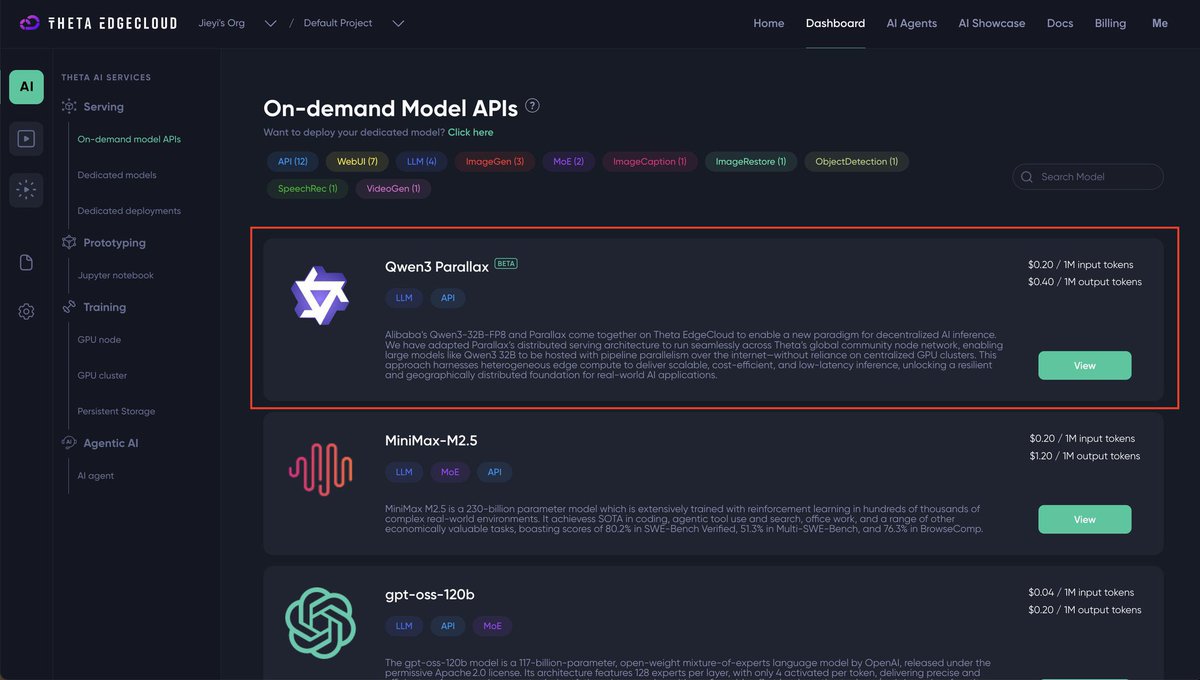
nvidia going all in on local ai.
here's our take: it shouldn't depend on which chip you bought.
sparks, macs, the 5090 already on your desk, we cluster across all of it and split your favorite model pipeline-parallel so it runs fully private and local.
Today, we share a breakthrough on the planar unit distance problem, a famous open question first posed by Paul Erdős in 1946.
For nearly 80 years, mathematicians believed the best possible solutions looked roughly like square grids.
An OpenAI model has now disproved that belief, discovering an entirely new family of constructions that performs better.
This marks the first time AI has autonomously solved a prominent open problem central to a field of mathematics.
How do you evaluate an LLM router fairly?
Most benchmarks look at prompts, but routers operate at an agentic-step level. A router that saves money but breaks the task could be worse than no router.
We open-sourced TwinRouterBench to measure this honestly.
🧵
Are you kidding me???
It grasps multiple objects with different ways, all at once with… a single hand???
No pauses. 1x speed.
GENE-26.5 is @gs_ai_’s robotics-native multimodal foundation model.
It’s trained on 200,000+ hours of real human hand data (motion, force, touch) and runs on a 54-DoF bimanual system:
Scaling that human data 4x lifted real-robot success rates from 16.6% to 65.6% on long-horizon dexterous tasks!!
Same model weights, zero fine-tuning for this exact sequence.
You know those tiny coordinated movements you do without thinking…?
Robots couldn’t reliably do that before. Now they can. Today.
This is the video you’ll send to my friends, outside of our bubble, when they say “robots are still just demos.”
Congrats to the entire team around @zhou_xian_!
Credit: Seen at Zu Wang (@zuwang95)
Genesis official announcement for the full story + longer demo:
https://t.co/1Lo3KRuubz)
———
Weekly robotics and AI insights.
Subscribe free: https://t.co/9Nm01QUcw3
Run Claude Code with Commonstack in 4 steps:
- generate an API key
- set 4 environment variables
- run claude
- /status to verify
Set it up now in 5 minutes with @alex_mirran.
We're open-sourcing Asimov v1, a humanoid robot.
With Asimov v1, you can build, train on, and make it your own humanoid robot. It's the first step of building a humanoid labor force for the rest of us.
Asimov v1 is 1.2 m tall, 35 kg, with 25 actuated degrees of freedom. Structural parts machined in 7075 aluminium and 3D-printed in MJF PA12 nylon.
We're releasing the mechanical design and simulation files. Ready for locomotion policy training out of the box.
The BOM is open too. Source everything yourself, or order the DIY Kit. All components, ready to assemble. $499 deposit, $15,000 target price. Ships end of summer 2026.
GitHub: https://t.co/kjqkny2oqW
Manual: https://t.co/9tjkteOcxO
DIY Kit: https://t.co/tzvzNyXQfA
Most humanoid robots are controlled by the companies that build them. Asimov v1 is built for the rest of us. Build it, test it, and share your feedback with the community.
Heard some people like wheels?😁
Humanoid robots are the ideal form of general-purpose robots (perfect for general AI and human-derived data). They can work without wheels — but they can also have wheels if they want. Whatever works.
Awesome to see @tryParallax’s distributed framework for heterogeneous machines being implemented and serving up inferences!
Build and customize your own clusters for AI like never before 🤖
./ LFG @Gradient_HQ