(please share)
📢 Only 3 weeks left until the RoboSoft 2026 submission deadline (October 15th)!
Don’t miss the chance to present in historic Kanazawa, Japan. Join us 👉 https://t.co/GfuXZasYO3
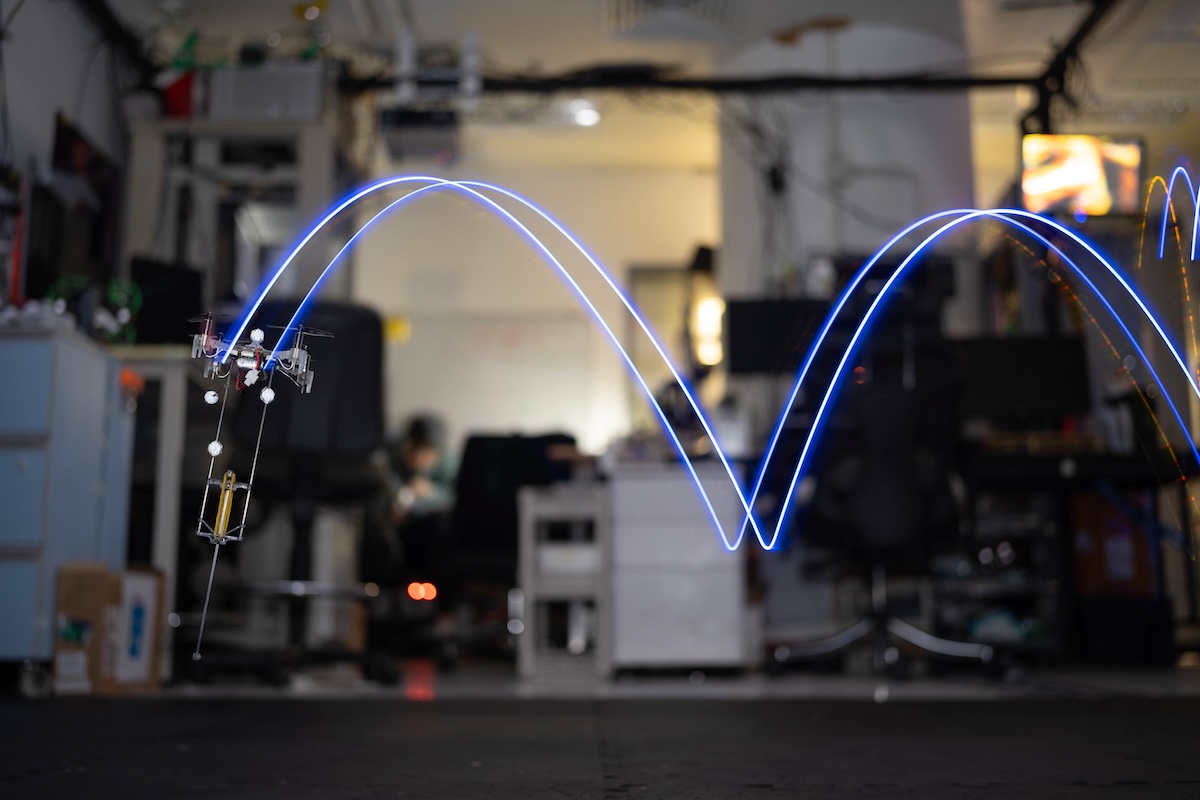
A “hopping,” insect-scale robot demonstrates locomotion efficiency by crossing difficult terrains, overcoming obstacles, and even performing somersaults using its flapping wings and single leg. @HsiaoNemo@pakpongc https://t.co/uqJqr8muDj
🚀 We’ve created a subgram hopper that combines flight and jumping! 🦗✈️
🔋 64% less power consumption
🏋️ 10× payload capacity
⛰️ traversing complex terrain
Collab with the amazing team, @HsiaoNemo and Kevin Chen
📄 https://t.co/bONkfvFPNJ
🎥 https://t.co/VqK33UEWgI
Meet the Wheeled Legged Drone!
Researchers at City University of Hong Kong have unveiled a hybrid aerial-ground robot that moves seamlessly between flight and wheeled mobility.
Equipped with a reconfigurable single-wheeled leg, it maintains stability in stance mode and achieves high-speed cruising with much higher endurance than a typical quadcopter.
The robot has promising applications in surveying and search and rescue. Where else could it be used?
Insect drones 💡
MIT researchers developed a new generation of insect-sized drones with impressive agility and resilience, inspired by the acrobatic flight of insects.
These tiny drones use innovative soft actuators, enabling them to navigate cramped spaces and withstand collisions, making them ideal for tasks like crop pollination, machinery inspection, and search-and-rescue missions.
While currently tethered to a power source due to high voltage requirements, future advancements could lead to untethered flight, potentially revolutionizing various industries with these ultra-small, durable drones.
Are we likely to see more of these insect-drones take off?
This drone is designed to split in two mid-flight
Researchers from City University of Hong Kong have developed a transformable quadcopter made up of two bicopters, each with just two propellers.
Despite differences in flight modes, both the bicopter and quadcopter configurations are controlled using a unified framework.
In experiments, an undocking mechanism with preloaded elastic energy helps the "SplitFlyer Air" disassemble in mid-air. This catapult-like mechanism allows the bicopters to stabilize and hover without losing altitude.
The successful mid-air disassembly shows potential for search and rescue missions or drone swarming, with potential to increase the number of drones in a single formation 💡
Congratulations to Dr. Siyi Xu, a postdoc in the group, on accepting a faculty position in the Department of Mechanical Science and Engineering @UofIllinois at Urbana/Champaign (UIUC). Siyi was an undergraduate researcher with us back at UIUC. She left to complete a PhD with Prof. Rob Wood at @Harvard University, and then returned to our group last year, to work on projects in bioelectronics. I look forward to continued collaborative work with her and her group as she quickly builds a set of exciting, independent set of research efforts at UIUC!! Thank you Siyi for all of your contributions to our programs!
Excited to share that I will join the Department of Biomedical Engineering @CityUHongKong as a tenure-track #Presidential Assistant Professor in July 2024! 🇭🇰 Sincerely appreciate all the strong support from @WeiGaoLab@Caltech, Alice Zhang @PKU1898, professors and friends! 🎉