The October issue of Science #Robotics is out!
This month's cover highlights a #zebrafish-inspired robot that can replicate visually guided #optomotor responses to stabilize its position against river currents. Learn about this research and more: https://t.co/wngomAc7L5
Scientists have developed a realistic #zebrafish simulation that can replicate how real larval zebrafish maintain their body position in flowing water, providing insight into the circuits guiding adaptive #visuomotor behaviors. @BIOROB_EPFL
https://t.co/klUmgMvAUu
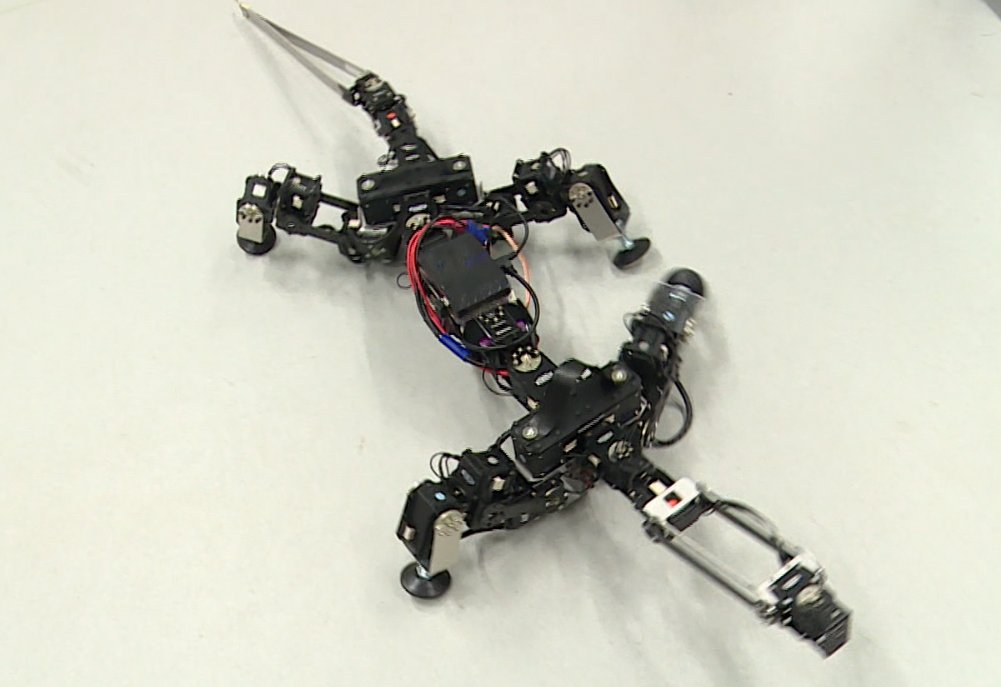
Scientists have designed a bioinspired controller that enables robots to stiffen and loosen their limbs to adapt to different motor tasks.
Read more in Science #Robotics: https://t.co/NLC8qbbImH
A #bioinspired#drone developed in @EPFL_en 's Lab of Intelligent Systems can walk, hop & jump into flight with the aid of birdlike legs, expanding the range of potential environments accessible to unmanned aerial vehicles! https://t.co/lrECG4997e @DFloreano @BIOROB_EPFL@Nature
It was an absolute pleasure to host the @ieeeras Keynote Session on Biorobotics, introducing some of the pioneers and thought leaders in the field: Auke Ijspeert @BIOROB_EPFL@BarbaraMazzolai@KasparAlthoefer &
Justin Werfel - Watch the session here: https://t.co/7Q6Y74VADx
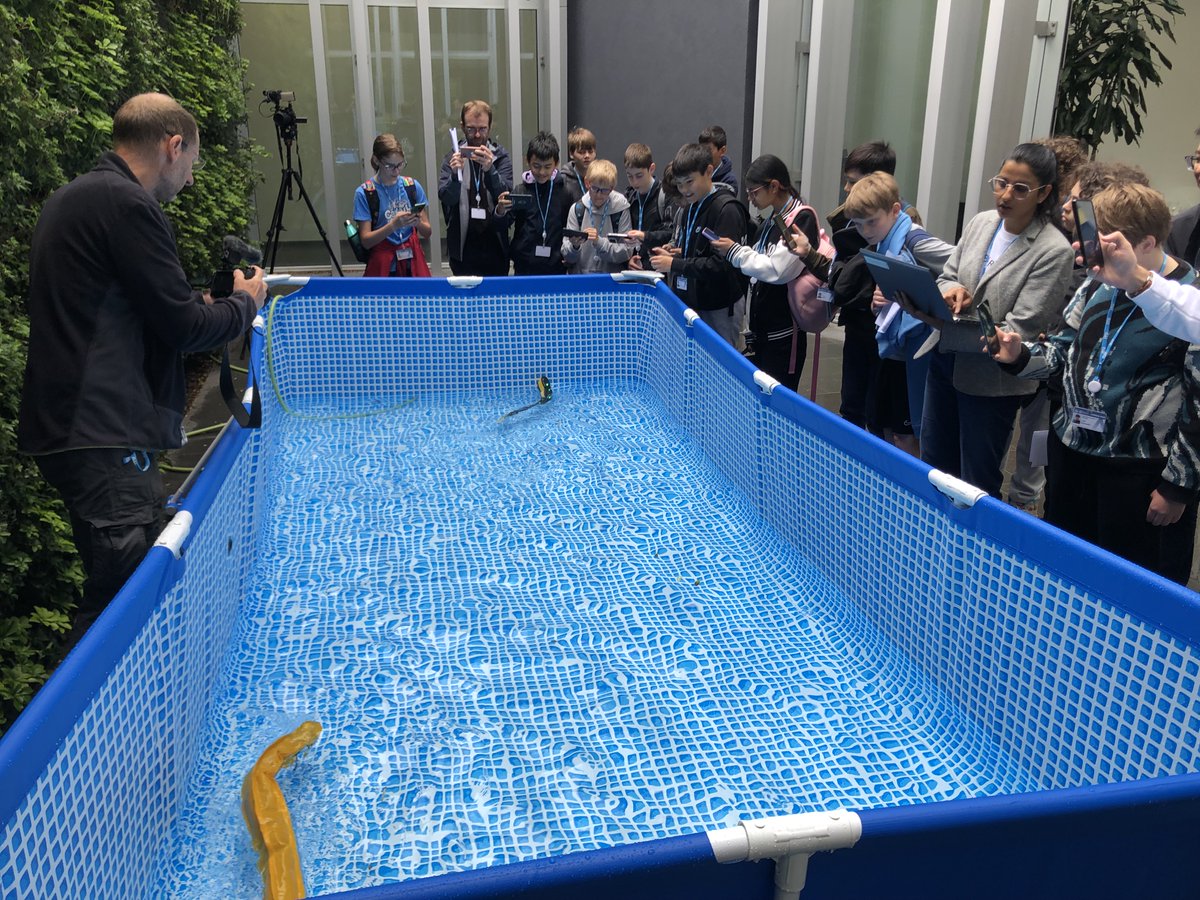
The Envirobot demos are taking place every 30 min (full and half-hour) in the building where people pick-up their badges, opposite of the main venue. Please come and have a look!
I am happy to announce that my lab will make live demos of our amphibious robots at the @AIforGood#ITUaiSummit taking place on the 30 and 31st of May 2024. I will also give a talk on the Frontiers Stage on Fri 31 8:20. @ITU/@UN https://t.co/EnIWd8PAY3
Many thanks for sharing this! Also many thanks to Stefan Schaal and Jun Nakanishi (co-authors and co-winners of the prize) + the IEEE selection committee + all of you who have used or cited DMPs (dynamical movement primitives) over the years.
In 2002, @BIOROB_EPFL co-presented a study on movement imitation in humanoid #robots at the @IEEEorg International Conference on Robotics & Automation. The impactful work recently won Most Influential Paper at @ieee_ras_icra 2024. Congratulations! Paper👉 https://t.co/vX1IXzmFmQ
A quadruped robot trained with #machinelearning by @EPFL_en researchers has learned to avoid falls by spontaneously switching between walking, trotting, and pronking – a milestone for roboticists as well as biologists interested in animal locomotion. https://t.co/5Ex2XXg97g
ÇA c'est de l'efficacité!
Another colourful journey of 1-guilla! This time in an intensive 3-minute talk (in French!)
Big thanks to my French "coaches" @gaetan_raynaud and Alice Bruel.
[video coming soon]
@UNFoLD_EPFL @BIOROB_EPFL
When the @BBC commissioned 2 reptilian #robots from @BIOROB_EPFL for a documentary in 2016, the scientists never imagined how testing the devices in uncontrolled environments would change their approach to #roboticdesign. @KMRoBoTa@SciRobotics@EPFL_en https://t.co/eQ8Y2mRXHJ
We trained a single policy to control diverse quadrupeds (to be presented at #ICRA2024)
ManyQuadrupeds: Learning a Single Locomotion Policy for Diverse Quadruped Robots
@MiladShafieeA@BIOROB_EPFL@gbellegarda
Webpage: https://t.co/KBrMhntrug
Arxiv: https://t.co/C7LtuA2noP