Coming soon: one of history’s most complex missions
Tune in on Tuesday, June 9, at 11am ET, to meet the astronauts flying aboard Artemis III, the mission that will test docking capabilities with commercial landers in low Earth orbit — an important step to crewed lunar landings.
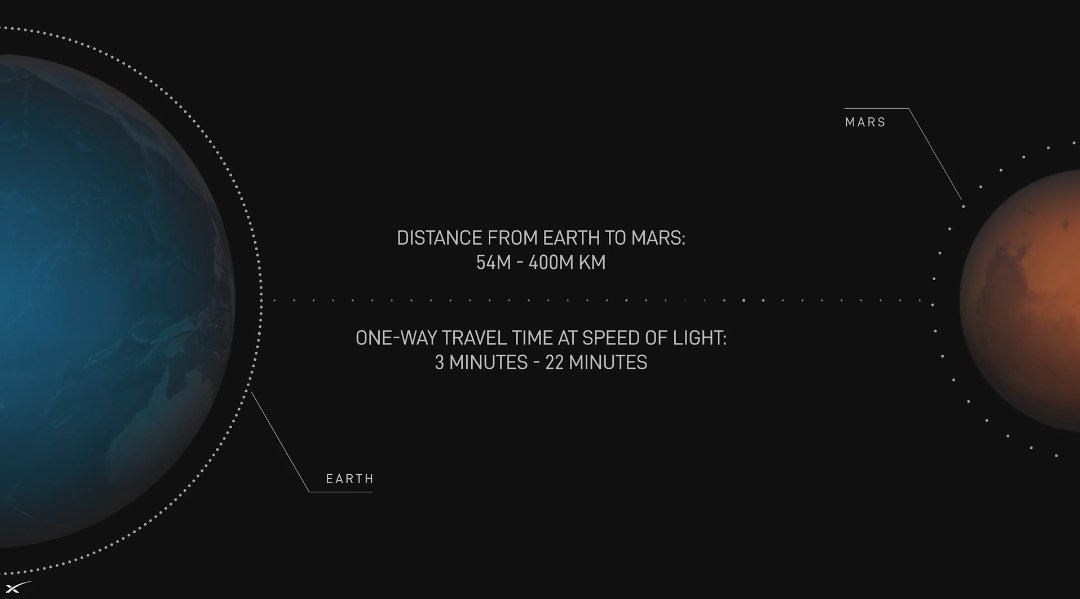
SpaceX's Starlink will be deployed around Mars to enable internet communication
Latency between Earth and Mars will vary from 3 minutes to 22 minutes, depending on their positions
Each Starlink purchase on Earth helps fund Starship missions to the Red Planet
Here’s a system prompt you can use inside a ChatGPT or Claude project.
The main idea is simple:
You feed it a basic idea, a rough image prompt, a scene description, or even an uploaded image, and it enhance it and return with 10 cinematic prompts, each exploring a different composition, camera angle.
For example, I used:
“a gladiator riding a horse on a mountainside”
And these are the results!
It's a great way to explore different visual languages, discover interesting compositions.
System prompt below. 👇
🏆 Après le @PSG_inside, @wemby, l’@UBBrugby, et en attendant la Coupe du Monde, la France qui gagne s’étend dans l’espace ! 🚀🇫🇷 Annonce cette semaine de deux missions spatiales FR en 2027 :
🛰️ Pour @Arno_astro, le dernier entré sur le terrain ⚽ : deux semaines sur une station prototype qui prépare la suite de l’ISS (après 2032). Un vol de test et de recherche, vers la première station privée au monde ! Son profil d’ingénieur d’essai en vol et de pilote est idéal.
👨🚀 Pour moi, le commandement, laissé pour la première fois en 65 ans à un non-américain 🇫🇷, d’une capsule ou navette américaine et de son équipage international 🌍 : le crew dragon de @SpaceX 🚀, pour deux semaines de recherche à bord de l’ISS. Le but : maximiser le retour sur investissement de la recherche avant la fin de la station !
💪 Environ une année d’entraînement intense nous attend tous les deux… un sprint 🏃♂️, plutôt qu’un marathon, et deux grandes premières qui montrent le rang de la France 🇫🇷 dans l’exploration spatiale.
🤝 Avec @Soph_astro à bord, et grâce à nos ingénieurs, chercheurs, enseignants du spatial, la France va disposer d’une équipe d’astronautes complémentaires unique en Europe pour remplir toutes les missions du futur, en orbite autour de la Terre 🌍 ou vers la lune ! 🌕
😅PS : étant Toulousain d’adoption, et Arnaud étant Marseillais, la première phrase nous coûte un peu à tous les deux, pas de jaloux…
🤩Hâte de revoir la Terre de haut et de partager l’aventure.
#ÉquipeDeFranceSpatiale #Pam6 #VAST #ESA #Cnes @vast@esa@ESA_fr@CNES
J'ai voyagé dans le temps et je ramène la meta pour devenir trillionaire :
- Ne pas chercher à contrôler l'humanité
- Être pour la liberté économique totale
- Être expansionniste ( on va coloniser le cosmos (lune et mars first) )
- Être pro-humain (la vie humaine et l'intégrité au dessus de tout )
C'est tout. Vous pouvez me remercier plus tard.
Our @NASARoman space telescope is officially slated to launch on Aug. 30!
Get the details and follow Roman's journey on our new Roman Space Telescope blog: https://t.co/72iud38kMm
Today, we’re excited to introduce Miso One, the most emotive voice model in the world.
Miso One is an 8-billion-parameter text-to-speech model for highly expressive speech generation. It emotes like a human and responds faster than a human, with just 110 milliseconds of latency.
We’ve open-sourced the model weights, with API access coming soon.
Hear how Miso One sounds in the thread below.
A first-of-its-kind proactive shopping experience. Personalized for you, delivered in minutes.
Powered fully by the Grok Voice, Imagine, and Reasoning APIs. Let's Go!
how to get started in robotics
don’t start with humanoids.
don’t start with expensive hardware.
don’t start with “ai robot assistant.”
start with fundamentals.
what to learn first:
• electronics → voltage, current, motors, sensors, batteries. robots live in the physical world.
• programming → python for robotics logic, c/c++ for performance and embedded systems.
• mechanics → wheels, joints, gears, frames, torque. if it moves, physics is involved.
• control → feedback loops, pid, stability. movement without control is just chaos.
• linear algebra → coordinate frames, transformations, rotations. robots need to know where things are.
• ros2 → nodes, topics, services, transforms. this is how modern robot systems talk.
• simulation → gazebo, mujoco, isaac sim. crash robots in software before you break hardware.
then build small:
- make a motor spin
- read a sensor
- control a wheeled robot
- simulate a robotic arm
- write a simple obstacle avoidance node
- log data and debug behavior
robotics is not one skill.
it is hardware, software, math, physics, control, ai, and systems engineering glued together.
the right way to start is simple:
learn one layer,
build one small thing,
debug it,
then add the next layer.
that’s how robots go from parts on a table
to machines that move with purpose.
Les gars, je viens de décider un truc : tous les mardis, je code maintenant sans IA, à l’ancienne, à la main, avec la doc (et Stack Overflow, RIP petit ange 😭).
Et ça fait trop bizarre, mais en même temps, je ressens un sentiment d’accomplissement. Enfin, je ne sais pas comment expliquer. En mode : « Wow, c’est moi qui ai tapé ça tout seul. » 👶🤡
Et surtout, ce jour-là, je prends le temps de revenir sur tout le code généré par IA que j’ai produit pour le vérifier, le comprendre, etc.
Bref, voilà. Si vous voulez faire pareil, je propose qu’on instaure les Old Coding Tuesdays. 🗿
🛰️🇫🇷 Thomas Pesquet repart sur l’ISS et Arnaud Prost à bord de la première station spatiale commerciale Haven-1 : la France continue de rayonner dans l’espace !
🔹 À l’occasion du Choose France Summit, Vast a annoncé l’implantation de son siège européen à Paris et la signature d’un partenariat avec le gouvernement français pour deux missions spatiales. Ces missions impliqueront les astronautes Thomas Pesquet et Arnaud Prost.
🔹 Thomas Pesquet commandera la sixième mission privée vers la Station spatiale internationale, en partenariat avec la NASA.
🔹 Arnaud Prost, astronaute de réserve de l’ESA, participera en tant qu’ingénieur d’essais en vol à la première mission habitée vers Haven-1, la future première station spatiale commerciale au monde.
🔹 Les deux missions, d’une durée d’environ deux semaines chacune, seront réalisées à bord d’une capsule Dragon de SpaceX lancé par une fusée Falcon 9.
👉 Davantage de détails concernant les missions françaises seront dévoilés lors du Sommet international de l’espace des 9 et 10 septembre à Paris.