So I’m collecting my own data:
✔️ multi-view camera setup
✔️ human tele-op demonstrations
✔️ variable object shapes & orientations
✔️ successful + failed grasps (both matter for learning)
Teleoperation isn’t just about control — it’s about teaching.
Today I pushed my S0-ARM101 through a series of soft-object manipulation tasks (banana picking 🍌).
Deformable objects are hard for robots — unpredictable geometry, slippery surfaces, and noisy depth signals.
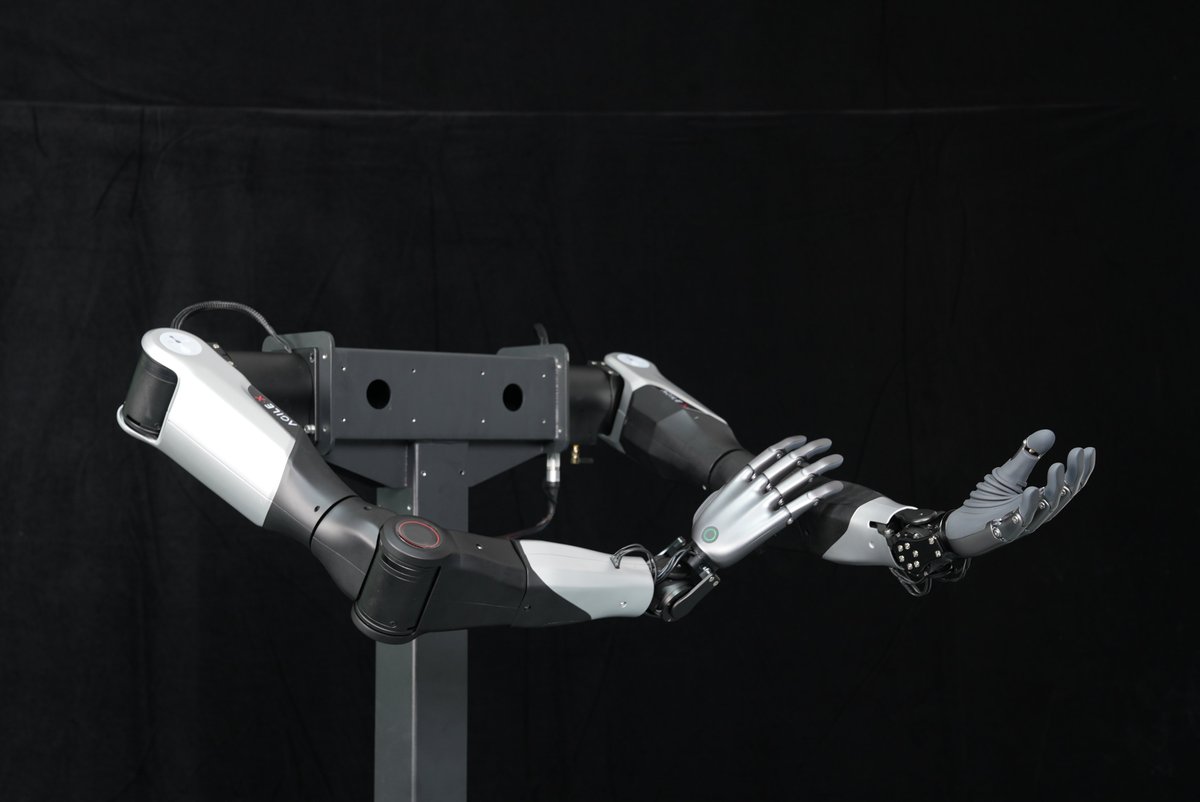
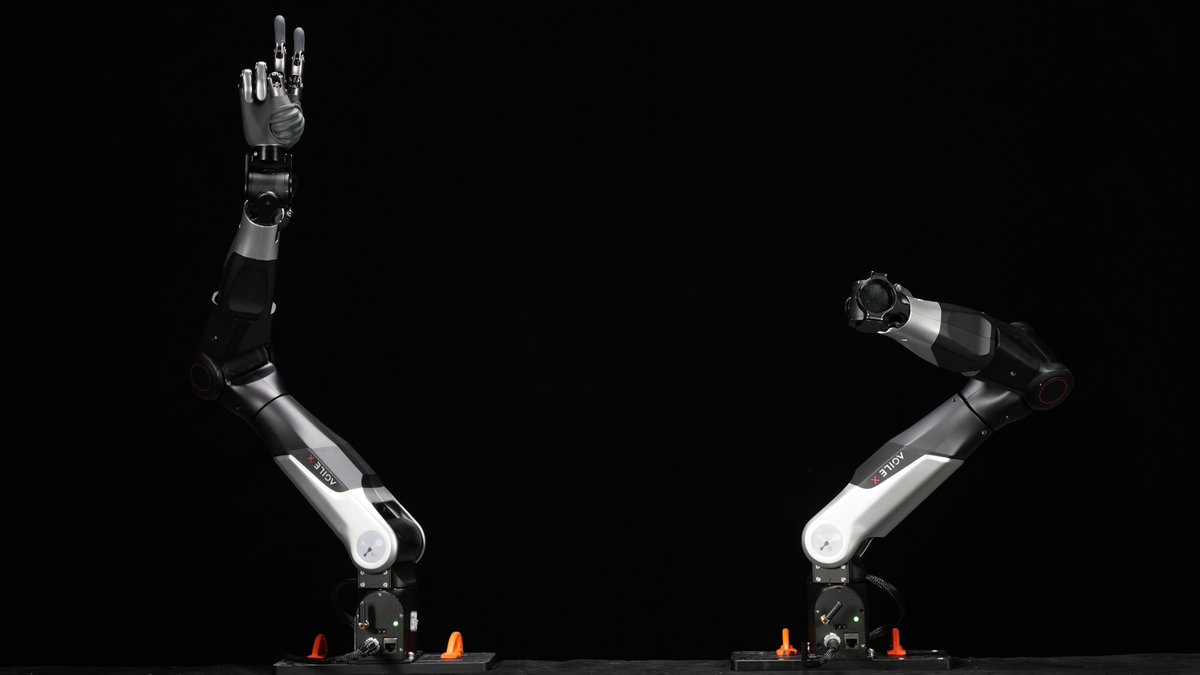
My tele-operation workspace is finally ready.
S0-ARM101, custom camera rig, controller input, and a full setup for robot manipulation experiments.
Time to collect data and build! 🤖✨
If you’re into tele-op, robot control, or manipulation datasets — let’s connect.
#Robotics
@TheHumanoidHub This is a big step for home robotics.
Love the tele-op based training loop — real human motion is still the best dataset for household manipulation.
Excited to see Memo in action next year.
1/5
What I learned already from this build:
• Wiring matters more than you think
• Cheap mounts → unexpected vibrations
• Camera angle can completely change dataset quality
• No two tele-op sessions ever feel the same
@huggingface@LeRobotHF
1/4
Teleoperation is underrated.
It’s the bridge between human intuition and robot precision — and it’s one of the fastest ways to train robots to perform real-world tasks.
@LeRobotHF@huggingface